Диференціальна геометрія, розділ геометрії, в якому геометричні образи вивчаються методами математичного аналізу. Головними об'єктами Д. р. є довільні досить гладкі криві (лінії) і поверхні евклідова простори, а також сімейства ліній і поверхонь. Зазвичай в Д. р. досліджуються локальні властивості геометричних образів, які властиві скільки завгодно малій їх частині. Розглядаються також і властивості геометричних образів в цілому (наприклад, властивості замкнутих опуклих поверхонь).
Геометричні об'єкти, що вивчаються в Д. р., зазвичай підпорядковані деяким вимогам гладкості. Як правило, ці вимоги виражаються в тому, що функції, задаючі вказані об'єкти, не менше двох разів безперервно діфференцируєми.
Суть методів Д. р., вживаних для з'ясування локальних властивостей геометричних об'єктів, найпростіше з'ясувати на прикладі локального дослідження форми кривих.
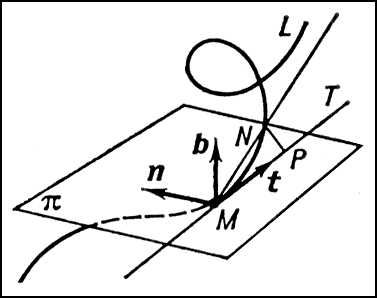
В кожній точці М-коду досить гладкої кривої L можна побудувати дотичну пряму МТ і дотичну плоскість p ( мал. 1 ). При цьому дотична МТ є межею січною MN при необмеженому наближенні точки N до М-коду по кривій L , а дотична плоскість є межа змінної плоскості, що проходить через дотичну МТ і точку N при наближенні N до М-коду по L . Дотичну МТ можна розглядати також як пряму, найтісніше прилеглу до L поблизу точки М-коду . Дотична ж плоскість є плоскістю, найтісніше прилеглу до L поблизу М-код .
Для геометричної характеристики викривленості кривої L поблизу даної точки М-коду розглядається дотичне коло, що є колом, що проходить через М-код і найтісніше прилеглу до L поблизу М-код . Ця властивість виражається в тому, що якщо враховувати величини лише 1-го і 2-го порядку крихти в порівнянні з довжиною дуги MN , то ділянка кривої L поблизу М-коду можна вважати дугою дотичного кола. Дотичне коло стосується L в точці М-коду і розташована в дотичній плоскості. Її центр називається центром кривизни кривої L в точці М-коду , а радіус — радіусом кривизни L в М-коді .
Для чисельної характеристики викривленості L в точці М-коду використовується кривизна до кривої, рівна зворотній величині радіусу R дотичного кола: до = 1/ R . Кривизну до можна розглядати і як міру відхилення L від дотичної МТ ( мал. 1 ):
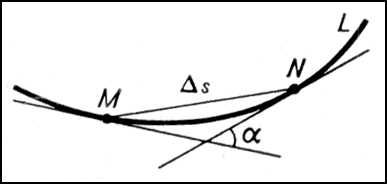
або як швидкість зміни (обертання) дотичній до L ( мал. 2 ):
де а — кут між дотичними в точках М-коду і N , а D s — довжина дуги MN .
Мірою відхилення кривої від дотичної плоскості p в точці М-коду служить так зване кручення s, яке визначається як межа відношення кута b між дотичною плоскістю в точках М-коду і N до довжини D s дуги MN при D s ® 0:
При цьому кут b береться із знаком +, якщо для спостерігача в М-коді обертання дотичної плоскості в N при наближенні N до М-коду відбувається проти годинникової стрілки, і із знаком — інакше. Кручення кривій можна розглядати як швидкість зміни (обертання) дотичній плоскості. Зокрема, для плоскої кривої дотична плоскість в усіх точках збігається з плоскістю кривої і тому кручення такої кривої в усіх точках дорівнює нулю. Кривизна до і кручення s досить гладкої кривої L визначені в кожній її крапці і є функціями параметра, що визначає точки цієї кривої. Для обчислення до і s використовується який-небудь спосіб завдання кривій. Найчастіше крива L задається параметричними рівняннями в прямокутних координатах:
x = j( t ), в = в( t ), z = з( t ). (1)
При зміні параметра t точка М-коду з координатами ( x , в , z ) описує криву L . Іншими словами, параметричні рівняння кривою пов'язані з уявленням про криву як траєкторію рухомої крапки. Праві частини (1) можуть розглядатися і як проекції на осі координат радіусу-вектора r змінної точки М-коду кривої L . Вектор r'' з координатами {j¢( t ), y¢( t ), c¢( t )} називається похідній вектор-функції r ( t ) і направлений по дотичній до L в точці М-коду .
Кривизна і кручення обчислюються по формулах
s = r''r"r"''/ [ r'' , r" ] 2 ,
в яких [ r'' , r" ] — векторне, а r''r''''r"'' — змішаний твір (див. Векторне числення ).
З кожною точкою М-коду кривої L зв'язані три одиничні вектори: дотичній ( t ), головній нормалі ( n ) і бінормалі ( b ) ( мал. 1 ). При цьому вектор ( n ) розташований в дотичній плоскості і направлений від точки М-коду до центру кривизни L в М-коді , а вектор b ортогональний t і n і направлений так, що вектори t , n і b утворюють праву трійку. Вказана трійка векторів утворює так званий основний, або супроводжуючий, трієдр кривої L . Плоскість векторів ( n , b ) і ( t , b ) називаються відповідно нормальною і випрямляючою плоскістю L в М-коді .
Формули для похідних векторів t , n , b по довжині s дуги L називаються формулами Френе. Вони грають фундаментальну роль як в теорії кривих, так і в додатках цієї теорії (у механіці, теоретичній фізиці і т.д.). Ці формули мають вигляд
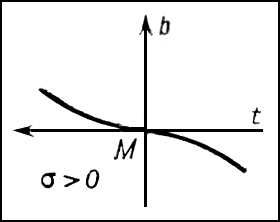
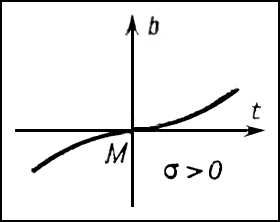
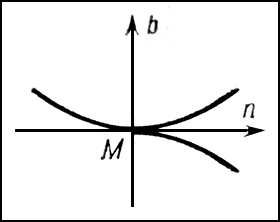
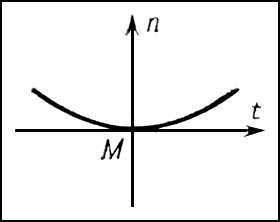
Якщо кривизна і кручення не дорівнюють нулю в точці М-коду , то можна зробити певні висновки про форму L поблизу М-код : проекції L на дотичну і нормальну плоскість в М-коді мають вигляд, змальований відповідно на мал. 3 і 4 . Форма проекції на випрямляючу плоскість залежить від знаку кручення. На мал.(малюнок) 5 і 6 змальовані проекції L на випрямляючу плоскість для s > 0 і s < 0. Кривизна і кручення сповна визначають криву. Саме, якщо між крапками два кривих встановлена відповідність так, що відповідні дуги цих кривих мають однакову довжину і у відповідних крапках криві мають рівні кривизни і рівні кручення, то ці криві можуть бути поєднані за допомогою руху.
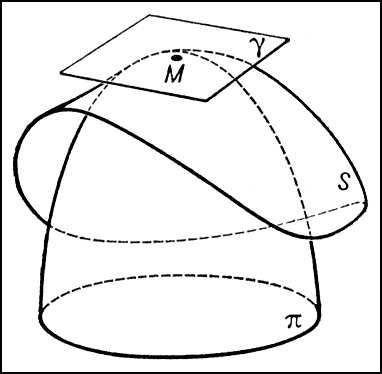
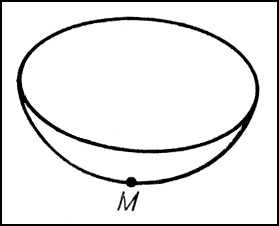
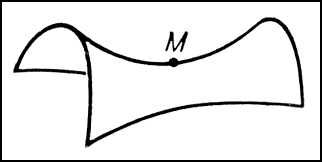
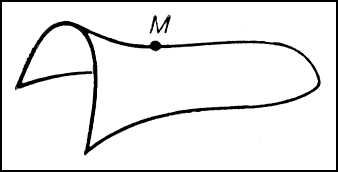
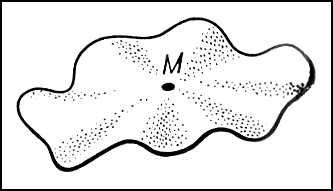
По аналогії з кривими досліджується локальна будова форми поверхонь. У кожній точці М-коду досить гладкої поверхні S можна побудувати дотичну плоскість g і однозначно певний дотичний параболоїд p ( мал. 7 ), який може звиродніти в параболічний циліндр або плоскість. При цьому дотичну плоскість можна розглядати як плоскість, найтісніше прилеглу до S поблизу М-код . Дотичний же параболоїд характеризується тим, що в околиці точки М-коду він збігається з S з точністю до величин третього порядку крихти в порівнянні з розмірами цієї околиці. За допомогою дотичних параболоїдів точки М-коду поверхонь класифікуються таким чином: еліптична ( мал. 8 ) (дотичний параболоїд — еліптичний), гіперболічна ( мал. 9 ) (дотичний параболоїд — гіперболічний), параболічна ( мал. 10 ) (дотичний параболоїд — параболічний циліндр), точка сплощення ( мал. 11 ) (дотичний параболоїд — плоскість).
Зазвичай для дослідження будови поверхні використовується так звана перша і друга основні квадратичні форми поверхні.
Хай поверхня S визначена параметричними рівняннями:
x = j ( u , v ), в = в ( u , v ), z = з ( u , v ). (2)
При фіксованому значенні v рівняння (2) визначають на S лінію, звану координатною лінією u . Аналогічно визначається лінія v . Координатні лінії u і v утворюють на S параметричну мережу (якщо, наприклад, сферу радіусу 1 задати параметричними рівняннями
х = cos u cos v , в = cos u sin v , z = sin u ,
те параметричною мережею ліній u і v будуть меридіани і паралелі цієї сфери). Величини u і v називаються також внутрішніми координатами, т.к. точка на поверхні є точка пересічення координатних ліній, що проходять через неї, тобто може бути знайдена шляхом побудов на поверхні без звернення до охоплюючого простору.
Радіус-вектор r довільної точки М-коду на S визначається рівняннями (2) як функція u і v . Приватні похідні r u і r v цієї функції суть вектори, дотичні відповідно до ліній u і v . Ці вектори в точці М-коду лежать в дотичній плоскості до S в М-коді . Векторний твір [ r u , r v ] визначає нормаль до S в точці М-коду .
Хай s — довжина дуги лінії L на S і хай u = f ( t ), v = g ( t ) — параметричні рівняння у внутрішніх координатах. Тоді, уподовж L r і s будуть функціями від t , причому диференціал s визначається рівністю ds 2 = dx 2 + dy 2 + dz 2 , права частина якого є скалярний квадрат вектора dr = r u du + r v dv , тобто ds 2 = dr 2 . Тому
ds 2 = r 2 u du 2 + 2 r u r v dudv + r 2 v dv 2 .
За допомогою позначень r 2 u = Е , r u r v = F , r 2 v = G вираження для ds 2 можна записати у вигляді
ds 2 = Edu 2 + 2 Fdudv + Gdv 2 . (3)
Права частина співвідношення (3) називається першою основною квадратичною формою поверхні S . За допомогою цієї форми можна вимірювати довжини дуг на поверхні шляхом інтеграції вираження
уздовж даної дуги. Тому форма (3) називається також метричною формою поверхні. Перша форма визначає також внутрішню геометрію поверхні, тобто сукупність фактів, які можуть бути отримані дорогою вимірів на поверхні, без звернення до охоплюючого простору. Внутрішня геометрія поверхні не міняється при її вигинанні — деформації поверхні як абсолютно гнучкої і нерозтяжної плівки.
Друга основна квадратична форма поверхні є вираженням
Ldu 2 + 2 Мdudv + Ndv 2 ,
в якому L = r uu n , М-код = r uv n , N = r vv n ( n — одиничний вектор нормалі до S в точці М-коду ). За допомогою другої форми можна отримати уявлення про просторову форму поверхні. Наприклад, кривизни 1/ R нормальних перетинів поверхні в даній точці М-коду (тобто ліній пересічення S з плоскістю, що проходить через нормаль в М-коді ) обчислюються за формулою
Дві основні форми поверхні, задані в яких-небудь внутрішніх координатах, визначають поверхню з точністю до положення в просторі. Якщо задано дві форми
Edu 2 + 2 Fdudv + Gdv 2
і
Ldu 2 + 2 Mdudv + Ndv 2 ,
перша з яких позитивна, а коефіцієнти L , M і N другою задовольняють деякій системі рівнянь, з яких одна (отримане До. Гаусом ) алгебра, а два інших (отримані До. М. Петерсоном ) — лінійні диференціальні рівняння з приватними похідними першого порядку, то знайдеться поверхня, для якої ці форми є відповідно першій і другій основними формами.
Відмічені рівняння Гауса — Петерсона грають фундаментальну роль в теорії поверхонь.
Одним з об'єктів досліджень в Д. р. є сімейства кривих і поверхонь. Такі сімейства задаються за допомогою рівнянь, що містять параметри. Наприклад, рівняння ( х - а) 2 + у 2 = 1, що містить параметр а, визначає сімейство кіл радіусу 1 з центрами в крапках (а, 0), тобто на осі Ox ( мал. 12 ). З сімейством кривих (поверхонь) пов'язано поняття такою, що огинає — такий кривій (поверхні), яка стосується всіх кривих (поверхонь) сімейства. У розглянутому вище прикладі огинає буде пара паралельних осі Ox прямих, віддалених від неї на відстані 1. Особливо детально в Д. р. досліджені двопараметричні сімейства прямих b в просторі, звані конгруенціями. Простий приклад конгруенції — сімейство паралельних прямих в просторі. Витоком теорії конгруенцій є геометрична оптика.
Різні розділи Д. р. присвячені вивченню у всіляких аспектах так званих диференціально-геометричних різноманітті . Прикладами таких многообразій можуть служити криві (одновимірні різноманіття), поверхні (двовимірні різноманіття), звичайне евклідове простір (тривимірне різноманіття). Складнішим прикладом може служити чотиривимірне різноманіття, елементами якого є прямі звичайного евклідова простори (пряма в декартових координатах визначається рівняннями вигляду z = ах + b , z = су + d ; числа а , b , з , d можна розглядати як координати цієї прямої).
Вивчення диференціально-геометричних многообразій ведеться по наступних основних напрямах. 1) Геометрія транзитивної групи відображень різноманіття на себе, або геометрія «локальної групи» відображень. У тематику цих питань входять звичайна класична локальна Д. р. (вивчення інваріантів групи рухів евклідова простори), аффінная, проектна і конформна геометрія (вивчення інваріантів відповідної групи перетворень). 2) Геометрія многообразій з ріманової метрикою (ріманових просторів ), що є узагальненням на багатовимірний випадок внутрішньої геометрії поверхонь, яке можна розглядати як двовимірні ріманови простори. Геометрія ріманових просторів грає важливу роль в теорії відносності. 3) Геометрія так званих фінслерових просторів, що є узагальненням ріманових просторів. 4) Геометрія многообразій із зв'язністю, тобто многообразій, в яких вказаний спосіб, за допомогою якого можна порівнювати геометричні образи, розташовані в дотичних просторах в різних крапках.
Виникнення Д. р. пов'язано з іменами Л. Ейлера і Г. Монжа . Ними до кінця 18 ст були отримані важливі факти теорії поверхонь. Значний внесок у розвиток Д. р. зроблений на початку 19 ст До. Гаусом, який ввів обидві основні квадратичні форми. Їм же була доведена теорема про інваріантність повної кривизни відносно ізометричних перетворень. Фактично їм були закладені основи внутрішньої геометрії поверхонь. Побудова основ класичної теорії поверхонь була завершена в середині 19 ст засновником московської геометричної школи До. М. Петерсоном. В середині і в 2-ій половині 19 ст багато глибоких і загальних результатів по класичній теорії поверхонь було отримано Ф. Міндінгом, Же. Ліувілем, Е. Бельтрамі, Же. Р. Дарбу, Л. Біанки . Ряд чудових результатів по класичній Д. р. був отриманий російськими ученими Д. Ф. Егоровим, Н. Н. Лузіним, С. П. Фініковим і ін.
В СРСР розроблялися різні напрями Д. г.; найбільші успіхи відносяться до області проблем «в цілому» (А. Д. Александров, А. Ст Погорелов і ін.).
Літ.: Монж Р., Додаток аналізу, до геометрії пер.(переведення) з франц.(французький), М. — Л., 1936; Стройк Д. Дж., Нарис історії диференціальної геометрії до XX століття, пер.(переведення) з англ.(англійський), М. — Л., 1941; Погорелов А. Ст, Диференціальна геометрія, 5 видавництво, М., 1969; Рашевський П. До., Курс диференціальної геометрії, 3 видавництва, М., 1950; Бляшке В., Введення в диференціальну геометрію, пер.(переведення) з йому.(німецький), М., 1957; Рашевський П. До., Ріманова геометрія і тензорний аналіз, 2 видавництва, М., 1964; Александров А. Д., Внутрішня геометрія опуклих поверхонь, М. — Л., 1948; Погорелов А. Ст, Зовнішня геометрія опуклих поверхонь, М., 1969.