Неевклідові геометрії, в буквальному розумінні — всі геометричні системи, відмінні від геометрії Евкліда; проте зазвичай термін «Н. г.» застосовується лише до геометричних систем (відмінним від геометрії Евкліда), в яких визначений рух фігур, причому з тією ж мірою свободи, що і в геометрії Евкліда. Міра свободи руху фігур в евклідової плоскості характеризується тим, що кожна фігура без зміни відстаней між її крапками може бути переміщена так, щоб будь-яка вибрана її крапка зайняла будь-яке заздалегідь призначене положення; крім того, кожна фігура може обертатися довкола будь-якої своєї крапки. У евклідовом тривимірному просторі кожна фігура може бути переміщена так, щоб будь-яка вибрана її крапка зайняла будь-яке заздалегідь призначене положення; крім того, кожна фігура може обертатися довкола будь-якої осі, що проходить через будь-яку її крапку.
Серед Н. р. особливе значення мають Лобачевського геометрія і Рімана геометрія, які найчастіше і мають на увазі, коли говорять о Н. р. Геометрія Лобачевського — перша геометрична система, відмінна від геометрії Евкліда, і перша загальніша теорія (що включає евклідову геометрію як граничний випадок). Геометрія Рімана, відкрита пізніше, в деяких стосунках протилежна до геометрії Лобачевського, але в той же час служить їй необхідним доповненням. Спільне дослідження геометрії Евкліда (див. Евклід геометрія ) , Лобачевського і Рімана дозволило в належній мірі з'ясувати особливості кожній з них, а також їх зв'язки один з одним і з іншими геометричними системами. Нижче обидві Н. р. і геометрія Евкліда зіставляються як синтетичні теорії, потім в плані диференціальної геометрії і, нарешті, у вигляді проектних моделей.
Н. р. як синтетичні теорії. Геометрія Лобачевського будується на основі тих же аксіом, що і евклідова, за винятком лише одній аксіоми про паралельних. Саме, згідно з аксіомою про паралельних евклідової геометрії, через крапку, не лежачу на даній прямій а, проходіт лише одна пряма, яка лежить в одній плоскості з прямою а і не пересікає цю пряму; у геометрії Лобачевського приймається, що таких прямих декілька (потім доводиться, що їх нескінченно багато).
В геометрії Рімана приймається аксіома: кожна пряма, лежача в одній плоскості з даною прямою, пересікає цю пряму. Ця аксіома протіворечит системі аксіом евклідової геометрії з виключенням аксіоми про паралельних. Т. о., система аксіом, лежача в основі геометрії Рімана, необхідно повинна відрізнятися від системи аксіом евклідової геометрія не лише заміною однієї аксіоми про паралельних іншим твердженням, але і в частині останніх аксіом. Різними в цій геометрії є аксіоми, які служать для обгрунтування так званих стосунків порядку геометричних елементів. Суть в наступному: у евклідової геометрії і в геометрії Лобачевського порядок крапок на прямій є лінійним, тобто подібним до порядку в безлічі дійсних чисел; у геометрії Рімана порядок крапок на прямій є циклічним, тобто подібним до порядку в безлічі крапок на колі. Крім того, в геометрії Евкліда і Лобачевського кожна пряма, лежача в даній плоскості, розділяє цю плоскість на дві частини; у геометрії Рімана пряма не розділяє плоскість на дві частини, тобто будь-які дві крапки плоскість, не лежача на даній прямій, можна з'єднати в цій плоскості безперервною дугою, не пересікаючи дану пряму (топологічною моделлю плоскості Рімана служить проектна плоскість ) .
Вимоги аксіом, що визначають рух фігур, для всієї трьох геометрії однакові.
Приклади теорем Н. р.
1) У геометрії Лобачевського сума внутрішніх кутів будь-якого трикутника менше двох прямих; у геометрії Рімана ця сума більше двох прямих (у евклідової геометрії вона рівна двом прямим).
2) У геометрії Лобачевського площа трикутника виражається формулою:
S = R 2 (p - а - b - g), (1)
де а, b, g — внутрішні кути трикутника, R — деяка постійна, яка визначається вибором одиниці виміру площ. У геометрії Рімана має місце формула:
S = R 2 (а + b + g - p) (2)
при аналогічному значенні символів (у евклідової геометрії залежності між площею трикутника і сумою його кутів немає).
3) У геометрії Лобачевського між сторонами і кутами трикутника існує ряд залежностей, наприклад
де sh, ch — гіперболічний синус і косинус (див. Гіперболічні функції ), а, b, з — сторони трикутника, а, b, g — кути, що протилежать ним, R — постійна, визначувана вибором масштабу; для прямокутного трикутника (з гіпотенузою з і прямим кутом g) має місце, наприклад, рівність:
При деякому узгодженні лінійного масштабу і одиниці виміру площ постійна R у формулах (1), (3), (4) буде однаковою. Число R називається радіусом кривизни плоскості (або простори) Лобачевського. Число R при даному масштабі виражає певний відрізок в плоскості (просторі) Лобачевського, який також називають радіусом кривизни. Якщо масштаб міняється, то міняється число R, але радіус кривизни, як відрізок, залишається незмінним. Якщо радіус кривизни прийняти за масштабний відрізок, то R = 1. У геометрії Рімана існує схожа рівність:
(для довільного трикутника) і
(для прямокутного) при аналогічному значенні символів. Число R називають радіусом кривизни плоскості (або простори) Рімана. Як видно з формул (4) і (6), в кожній з Н. р. гіпотенуза прямокутного трикутника визначається його кутами; більш того, в Н. р. сторони будь-якого трикутника визначаються його кутами, тобто не існує подібних трикутників, окрім рівних. У евклідової геометрії немає формул, аналогічних формулам (4) і (6), і немає жодних ін. формул, що виражають лінійні величини через кутові. При заміні R на Ri
формули (1), (3), (4) перетворюються на формули (2) (5) (6); взагалі при заміні R на Ri всі метричні формули геометрії Лобачевського (що зберігають при цій заміні геометричний сенс) переходять у відповідні формули геометрії Рімана. При R ® ¥ і ті та інші дають в межі формули евклідової геометрії (або втрачають сенс). Прагнення до нескінченності величини R означає, що масштабний відрізок є нескінченно малим в порівнянні з радіусом кривизни (як з відрізком). Та обставина, що при цьому формули Н. р. переходять в межі у формули евклідової геометрії, означає, що для малих (в порівнянні з радіусом кривизни) нєєвклідових фігур співвідношення між їх елементами мало відмінні від евклідових.
Н. р. в плані диференціальної геометрії. У кожній з Н. р. диференціальні властивості плоскості аналогічні диференціальним властивостям поверхонь евклідова простори (див. Диференціальна геометрія ) ; в нєєвклідової плоскості можуть бути введені внутрішні координати u, v, так що диференціал ds дуги кривої, відповідний диференціалам du, dv координат, визначається рівністю:
ds 2 = Edu 2 + 2 Fdudv + Gdv 2 (7)
Хай, в частковості, як координата u довільної точки М-коду береться довжина перпендикуляра, опущеного з М-коду на фіксовану пряму, а як координата v — відстань від фіксованої точки Про цієї прямої вщент вказаного перпендикуляра; величини u, v слід брати із знаком, подібно до звичайних декартових координат. Тоді формула (7) для плоскості Лобачевського матиме вигляд:
а для плоскості Рімана
R — та ж постійна, яка входить у формули попереднього розділу (радіус кривизни). Праві частини (8) і (9) суть метричні форми поверхонь евклідова простори, що мають відповідно постійну негативну кривизну До = — 1/ R 2 (як, наприклад, псевдосфера) і постійну позитивну кривизну До = 1 /r 2 (як, наприклад, сфера). Тому внутрішня геометрія досить малої частини плоскості Лобачевського збігається з внутрішньою геометрією на відповідній частині поверхні постійної негативної кривизни. Аналогічно, внутрішня геометрія досить малих частин плоскості Рімана реалізується на поверхнях постійної позитивної кривизни (поверхонь, які реалізують геометрію всій плоскість Лобачевського, в евклідовом просторі немає). При заміні R на Ri метрична форма (8) переходить в метричну форму (9). Оскільки метрична форма визначає внутрішню геометрію поверхні, то при такій заміні і інші метричні співвідношення геометрії Лобачевського переходять в метричні співвідношення геометрії Рімана (що вже було відмічене вищим). При R = ¥ кожне з рівності (8) і (9) дає
ds 2 = du 2 + dv 2 ,
тобто метричну форму евклідової плоскості.
Тривимірні неевклідові простори по своїх диференціальних властивостях належать до ріманових просторів в широкому сенсі (див. Ріманово простір ) і виділяються серед них раніше всього тим, що мають постійну ріманову кривизну (див. Ріманова геометрія ) . Як в двовимірному, так і в тривимірному випадку постійність кривизни забезпечує однорідність простору, тобто можливість руху фігур в нім, причому з тією ж мірою свободи, як (відповідно) на евклідової плоскості або в евклідовом просторі. Простір Лобачевського має негативну кривизну, рівну, — 1 /r 2 , простір Рімана — позитивну кривизну, рівну 1/ R 2 ( R — радіус кривизни). Евклід простір займає проміжне положення і є простором нульової кривизни.
Простори постійної кривизни можуть мати вельми всіляку будову в сенсі топології . Серед всіх просторів постійної негативної кривизни простір Лобачевського однозначно виділяється двома властивостями: воно повне (у сенсі повноти метричного простору ) , топологічно еквівалентно звичайному евклідову простору. Простір Рімана серед всіх просторів позитивної кривизни однозначно виділяється властивістю топологічної еквівалентності проектному простору. Аналогічними умовами виділяються багатовимірні простори Лобачевського і Рімана серед багатовимірних просторів постійної ріманової кривизни.
Н. р. у вигляді проектних моделей. Хай на проектній плоскості введені проектні однорідні координати ( x 1 , x 2 , x 3 ) і задана деяка овальна лінія другого порядку, що позначається далі буквою до, наприклад
x 1 2 + x 2 2 + x 3 2 = 0
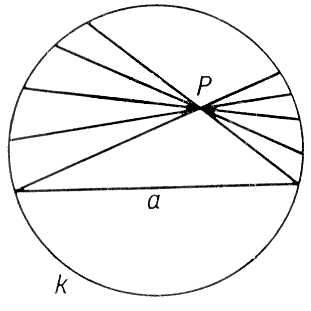
Кожне проектне відображення проектної плоскості на себе, яке залишає на місці лінію до, називається автоморфізмом відносно до. Кожен автоморфізм відображує внутрішні точки лінії до також у внутрішні її крапки. Безліч всього автоморфізму відносно лінії до складає групу . Хай розглядаються лише точки проектної плоскості, лежачі усередині до; хорди лінії до називаються «прямими». Дві фігури хай вважаються рівними, якщо одна з них переводиться в іншу деяким автоморфізмом. Оскільки автоморфізм складає групу, то мають місце основні властивості рівності фігур: якщо фігура А дорівнює фігурі В, те В рівна А; якщо фігура А дорівнює фігурі В , а В дорівнює фігурі З , то А. рівна З . У отримуваній т.ч. геометричні теорії будуть дотримані вимоги всіх аксіом евклідової геометрії, окрім аксіоми про паралельних: замість цієї останньої аксіоми дотримується аксіома про паралельні Лобачевського (див. малюнок де показано, що через точку Р проходіт нескінченно багато «прямих», не пересікаючих «прямої» а ). Тим самим виходить тлумачення (двовимірною) геометрії Лобачевського за допомогою об'єктів проектної плоскості або, як то кажуть, проектна модель геометрії Лобачевського; лінію до називають абсолютом цієї моделі. Автоморфізм відносно до грають роль рухів. Тому геометрію Лобачевського можна розглядати як теорію, що вивчає властивості фігур і пов'язані з фігурами величини, які залишаються незмінними при автоморфізмі; коротше кажучи, геометрію Лобачевського можна розглядати як теорію інваріантів групи автоморфізму відносно овального абсолюту.
Геометрія Рімана (двовимірна) допускає схоже тлумачення; саме вона є теорією інваріантів відносно нульового абсолюту
x 1 2 + x 2 2 + x 3 2 = 0. (10)
При цьому як крапки і прямі моделі беруться всі крапки і прямі проектної плоскості; автоморфізм визначається чисто алгебра як лінійні перетворення, які переводять рівняння (10) в рівняння того ж вигляду.
геометрію Евкліда також можна розглядати як теорію інваріантів деякої групи проектних перетворень, саме, групи автоморфізму відносно виродженого абсолюту
x 1 2 + x 2 2 = 0, x 3 = 0,
тобто відносно уявних крапок (1, i, 0) (1 — i, 0); ці крапки називають круговими крапками. Предметом моделі є всі точки проектної плоскості, окрім крапок прямій x 3 = 0, і всі прямі проектної плоскості, окрім прямої x 3 = 0. У останньому випадку автоморфізм грає роль подібних перетворень, а не рухів, як в разі Н. р.
Розглянуті моделі відносяться до двовимірної геометрії; проектні моделі вищої розмірності будуються аналогічно.
Відповідно характеру рівнянь абсолютов, геометрія Лобачевського називається гіперболічною, геометрія Рімана — еліптичною, геометрія Евкліда — параболічною.
Н. р. мають істотні застосування в математиці (теорії аналітичних функцій, теорії груп і ін.) і суміжних з нею областях (наприклад, в теорії відносності). Ці застосування засновані на тому, що всілякі конкретні моделі Н. р. пов'язані з різними об'єктами і поняттями вказаних розділів математики і суміжних з нею областей. Про значення Н. р. див.(дивися) також Геометрія .
Літ.: Александров П. С., Що таке неевклідового геометрія, М., 1950; Клейн Ф., Неевклідового геометрія, пер.(переведення) з йому.(німецький), М. — Л., 1936; Ефімов Н. Ст, Вища геометрія, 4 видавництва, М., 1961.