Аналітична геометрія, розділ геометрії. Основними поняттями А. р. є прості геометричні образи (крапки, прямі, плоскість, криві і поверхні другого порядку). Основними засобами дослідження в А. р. служать метод координат (див. нижчий) і методи елементарної алгебри. Виникнення методу координат тісно пов'язане з бурхливим розвитком астрономії, механіки і техніка в 17 ст Виразний і вичерпний виклад цього методу і основ А. р. було зроблено P. Декартом в його «Геометрії» (1637). Основні ідеї методу були відомі також його сучасникові П. Ферма . Подальша розробка А. р. пов'язана з працями Р. Лейбніца, І. Ньютона і особливо Л. Ейлера . Засобами А. р. користувався Ж. Лагранж при побудові аналітичної механіки і Г. Монж в диференціальній геометрії. Нині А. р. не має самостійного значення як наука, проте її методи широко застосовуються в різних розділах математики, механіки, фізики і ін. наук.
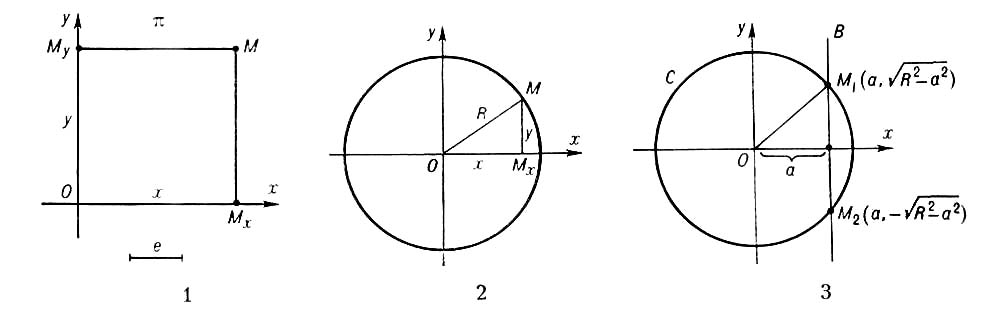
Суть методу координат полягає в наступному. Розглянемо, наприклад, на плоскості p дві взаємно перпендикулярні прямі Ox і Оу ( мал. 1 ). Ці прямі з вказаним на них напрямом, початком координат Про і вибраною масштабною одиницею е утворюють т.з. декартову прямокутну систему координат Оху на плоскості. Прямі Ox і Оу називаються відповідно віссю абсцис і віссю ординат. Положення будь-якої точки М-коду на плоскості по відношенню до цієї системи Оху можна визначити таким чином. Хай M x і M в — проекції М-коду на Ox : і Оу, а числа х і в — величини відрізань Om x і ОМ в (величина х відрізання Om x , наприклад, дорівнює довжині цього відрізання узятою із знаком плюс, якщо напрям від Про до M x збігається з напрямом на прямій Ox, і із знаком мінус в протилежному випадку). Числа х і в називаються декартовими прямокутними координатами точки М-коду в системі Оху. Зазвичай вони називаються відповідно абсцисою і ординатою точки M. Для позначення крапки М-кодом з абсцисою х і ординатою в користуються символом М-коду ( х,у ) . Ясно, що координати точки М-коду визначають її положення відносно системи Оху.
Хай на плоскості p з даною декартовою прямокутною системою координат Оху задана деяка лінія L. Використовуючи поняття координат крапок, можна ввести поняття рівняння даної лінії L відносно системи Оху як співвідношення вигляду F ( x,y ) = 0, якому задовольняють координати х і в будь-якої точки M, розташованою на L, і не задовольняють координати кожної точки, не лежачої на L. Якщо, наприклад, лінія L є колом радіусу R з центром на початку координат O , то рівняння x 2 + y 2 — R 2 = 0 буде рівнянням даного кола, в чому можна переконатися, звернувшись до мал. 2 . Якщо точка М-коду лежить на колі, то по теоремі Піфагора для трикутника Omm x виходить x 2 + y 2 — R 2 = 0. Якщо ж крапка не лежить на колі, то, очевидно, x 2 + y 2 — R 2 ¹ 0. Отже, лінії L на плоскості можна зіставити її рівняння F ( x,y ) = 0 відносно системи координат Оху.
Основна ідея методу координат на плоскості полягає в тому, що геометричні властивості лінії L з'ясовуються шляхом вивчення аналітичними і алгеброю засобами властивостей рівняння F ( x,y ) = 0 цій лінії. Наприклад, застосуємо метод координат для з'ясування числа точок пересічення кола З радіусу R і даній прямій лінії В ( мал. 3 ). Хай початок системи координат Оху знаходиться в центрі кола, а вісь Ox направлена перпендикулярно прямою Ст Оскільки пряма В перпендикулярна осі Ox, те абсциса будь-якої точки цієї прямої дорівнює деякій постійною а. Т. о., рівняння прямої В має вигляд x — а = 0. Координати ( x, в ) точки пересічення кола З (ур-ніє якою має вигляд x 2 + y 2 — R 2 = 0) і прямій В задовольняють одночасно рівнянням
x 2 + y 2 - R 2 = 0, х - а = 0, (1)
тобто є вирішенням системи (1). Отже, геометричне питання про число точок пересічення прямої і кола зводиться до аналітичному питанню про число вирішень системи алгебри (1). Вирішуючи цю систему, отримують х = а, в = ± R 2 — a 2 . Отже, коло і пряма можуть перетинатися в двох крапках ( R 2 > a 2 ) (цей випадок змальований на мал. 3 ), можуть мати одну загальну крапку ( R 2 = a 2 ) (в цьому випадку пряма В стосується кола C) і не мати загальних крапок ( R 2 < a 2 ) (в цьому випадку пряма В лежить поза колом C).
В А. р. на плоскості детально вивчаються геометричні властивості еліпса, гіперболи і параболи, що є лініями пересічення кругового конуса з плоскістю, що не проходить через його вершину (див. Конічні перетини ) . Ці лінії часто зустрічаються в багатьох завданнях природознавства і техніки. Наприклад, рух матеріальної крапки під впливом центрального поля сили тяжіння відбувається по одній з цих ліній; у інженерній справі для конструювання прожекторів, антен і телескопів користуються важливим оптичним властивістю параболи, що полягає в тому, що промені світла, витікаючі з певної крапки (фокусу параболи), після віддзеркалення від параболи утворюють паралельний пучок.
В А. р. на плоскості систематично досліджуються т.з. лінії алгебри першого і другого порядків (ці лінії в декартових прямокутних координатах визначаються відповідно рівняннями алгебри першого і другого ступеня). Лінії першого порядку суть прямі, і назад кожна пряма визначається рівнянням алгебри першого ступеня Ax + By + З = 0. Лінії другого порядку визначаються рівняннями вигляду Ax 2 + Вху + Су 2 + Dx + Еу + F = 0. Основний метод дослідження і класифікації цих ліній полягає в підборі такої декартової прямокутної системи координат, в якій рівняння лінії має найбільш простий вигляд, і подальшому дослідженні цього простого рівняння. Можна довести, що в такий спосіб рівняння будь-якої речової лінії другого порядку може бути приведене до одного з наступних простих видів:
Перше з цих рівнянь визначає еліпс, друге — гіперболу, третє — параболу, а останні два — пару прямих (пересічних, паралельних або таких, що злилися).
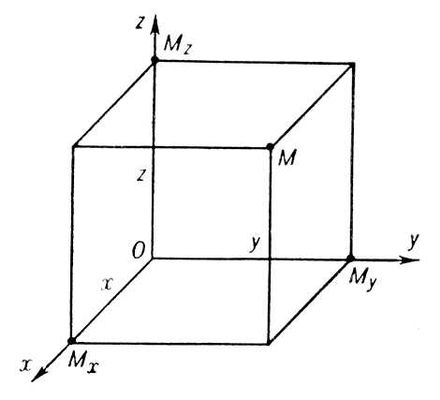
В А. р. в просторі також користуються методом координат. При цьому декартові прямокутні координати . x , в і z (абсциса, ордината і апліката) точок М-коду вводяться в повній аналогії з плоским випадком ( мал. 4 ). Кожній поверхні S в просторі можна зіставити її рівняння F ( x, в, z ) =0 відносно системи координат Oxyz. (Так, наприклад, рівняння сфери радіусу R з центром на початку координат має вигляд x 2 + y 2 + z 2 — R 2 = 0.) При цьому геометричні властивості поверхні S з'ясовуються шляхом вивчення аналітичними і алгеброю засобами властивостей рівняння цієї поверхні. Лінію L в просторі задають як лінію пересічення двох поверхонь S 1 і S 1 . Еслі F 1 ( x, в, z ) = 0 і F 2 ( x, в, z ) = 0 — рівняння S 1 і S 2 , то пара цих рівнянь, що розглядається спільно, є рівнянням лінії L. Наприклад, пряму L в просторі можна розглядати як лінію пересічення двох плоскості. Оскільки плоскість в просторі визначається рівнянням вигляду Ax + By + Cz + D = 0, то пара рівнянь такого вигляду, що розглядається спільно, є рівнянням прямої L. Т. о., метод координат може застосовуватися і для дослідження ліній в просторі. У A. р. в просторі систематично досліджуються т.з. поверхні алгебри першого і другого порядків. З'ясовується, що поверхнями алгебри першого порядку є лише плоскість. Поверхні другого порядку визначаються рівняннями вигляду:
Основний метод дослідження і класифікації цих поверхонь полягає в підборі такої декартової прямокутної системи координат, в якій рівняння поверхні має найбільш простий вигляд, і подальшому дослідженні цього простого рівняння. Найважливішими речовими поверхнями другого порядку є еліпсоїди, однопорожнинний і двуполостний гіперболоїди, еліптичний і гіперболічний параболоїди . Ці поверхні в спеціально вибраних декартових прямокутних системах координат мають наступні рівняння:
Перераховані найважливіші поверхні другого порядку часто зустрічаються в різних питаннях механіки, фізики твердого тіла, теоретичній фізиці і інженерній справі. Так, при вивченні напруги, що виникає в твердому телі, користуються поняттям т. н: еліпсоїд напруги. У різних інженерних спорудах застосовуються конструкції у формі гіперболоїдів і параболоїдів.
Літ.: Декарт Р. Геометрія, [пер. з франц.(французький)], М-код.—Л., 1938; Вілейтнер Р., Історія математики від Декарта до середини XIX століття, пер.(переведення) з йому.(німецький), 2 видавництва, М., 1966; Ефімов Н. Ст, Короткий курс аналітичної геометрії, 9 видавництво, М., 1967; Ільін Ст А., Позняк Е. Р., Аналітична геометрія, М., 1967; Александров П. С., Лекції з аналітичної геометрії, М., 1968; Хвальків С. Ст, Моденов П. С., Пархоменко А. С., Збірка завдань по аналітичній геометрії, 3 видавництва, М., 1964; Клетеник Д. Ст, Збірка завдань по аналітичній геометрії, 9 видавництво, М., 1967.