Автоматичне управління в техніці, сукупність дій, направлених на підтримку або поліпшення функціонування керованого об'єкту без безпосередньої участі людини відповідно до заданої мети управління. А. в. широко застосовується в багатьох технічних і біотехнічних системах для виконання операцій, не здійсненних людиною у зв'язку з необхідністю переробки великої кількості інформації в обмежений час, для підвищення продуктивності праці, якості і точність регулювання, звільнення людини від управління системами, що функціонують в умовах відносної недоступності або небезпечних для здоров'я (див. Автоматизація виробництва, Автоматизація управлінських робіт, Велика система ). Мета управління тим або іншим чином зв'язується із зміною в часі регульованої (керованою) величини — вихідної величини керованого об'єкту. Для здійснення мети управління, з врахуванням особливостей керованих об'єктів різної природи і специфіки окремих класів систем, організовується дія на органи, що управляють, об'єкту — дія, що управляє. Воно призначене також для компенсації ефекту зовнішніх обурюючих дій, прагнучих порушити необхідну поведінку регульованої величини. Дія, що управляє, виробляється пристроєм управління (УУ). Сукупність тих, що взаємодіють пристрою, що управляє, і керованого об'єкту утворює систему автоматичного управління.
Система автоматичного управління (САУ) підтримує або покращує функціонування керованого об'єкту. У ряді випадків допоміжні для САУ операції (пуск, зупинка контроль, наладка і так далі) також можуть бути автоматизовані. САУ функціонує в основному у складі виробничого або якого-небудь іншого комплексу.
Історія техніки налічує багато ранніх прикладів конструкцій, що володіють всіма відмінними рисами САУ (регулювання потоку зерна на млині з т.з. «потряськом», рівня води в паровому казані машини Ползунова, 1765, і т. д.). Першою замкнутою САУ, що отримала широке технічне вживання була система автоматичного регулювання з відцентровим регулювальником в паровій машині Уатта (1784). У міру вдосконалення парових машин, турбін і двигунів внутрішнього згорання усе більш широко використовувалися різні механічні регулюючі системи і пристрої, що досягли значного розвитку в кінці 19, — початку 20 вв.(століття) Новий етап в А. в. характеризується впровадженням в системи регулювання і управління електронних елементів і пристроїв автоматики і телемеханіки. Це зумовило появу високоточних систем стеження і наведення, телекерування і телевимірювання, системи автоматичного контролю і корекції. 50-і рр. 20 ст ознаменувалися появою складних систем управління виробничими процесами і промисловими комплексами на базі електронних керівників обчислювальних машин.
САУ класифікуються в основному по меті управління, типові контура управління і способу передачі сигналів. Спочатку перед САУ ставилися завдання підтримки певних законів зміни в часі керованих величин. У цьому класі систем розрізняють системи автоматичного регулювання (CAP), в завдання яких входить збереження постійними значення керованої величини; системи програмного управління, де керована величина змінюється за заданою програмою; стежачі системи, для яких програма управління заздалегідь невідома. Надалі мета управління стала зв'язуватися безпосередньо з певними комплексними показниками якості, що характеризують систему (її продуктивність, точність відтворення і т. п.); до показника якості можуть пред'являтися вимоги досягнення ним граничних (найбільших або найменших) значень, для чого були розроблені адаптивні, або системи, що пристосовуються . Останні розрізняються за способом управління: у самоналагоджувальних системах міняються параметри пристрою управління, поки не будуть досягнуті оптимальні або близькі до оптимальних значення керованих величин; у системах, що самоорганізующихся, з тією ж метою може мінятися і її структура. Найбільш широкі, в принципі, можливості самонавчальних систем, поліпшуючих алгоритми свого функціонування на основі аналізу досвіду управління. Відшукання оптимального режиму в адаптивних САУ може здійснюватися як за допомогою автоматичного пошуку, так і беспоїськовим чином.
Спосіб компенсації обурень пов'язаний з типом контура управління системи. У розімкнених САУ на УУ не поступають сигнали, що несуть інформацію про поточний стан керованого об'єкту, або в них вимірюються і компенсуються головні з обурень, або управління ведеться за жорсткою програмою, без аналізу яких-небудь чинників в процесі роботи. Основний тип САУ — замкнуті, в яких здійснюється регулювання по відхиленню, а ланцюг проходження сигналів утворює замкнутий контур, що включає об'єкт управління і УУ; відхилення керованої величини від бажаних значень компенсуються дією через зворотний зв'язок, незалежно від причин, що викликали ці відхилення. Об'єднання принципів управління по відхиленню і по обуренню приводить до комбінованих систем. Часто, окрім основного контура управління, що замикається головним зворотним зв'язком, в САУ є допоміжні контури (багатоконтурні системи) для стабілізації і корекції динамічних властивостей. Одночасне управління декількома величинами, що впливають один на одного здійснюється в системах багатозв'язкового управління або регулювання.
За формою представлення сигналів розрізняють дискретні і безперервні САУ. По-перше сигнали, принаймні в одній точці ланцюга проходження, квантуються за часом (див. Імпульсна система ), або по рівню (див. Релейна система ), або як по рівню, так і за часом (див. Квантування сигналу ).
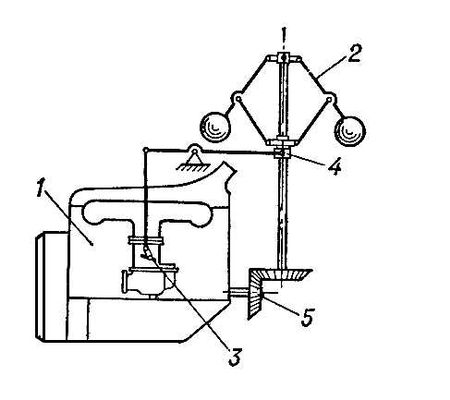
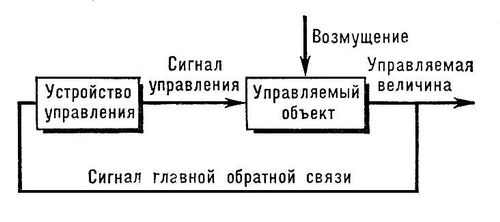
Простий приклад САУ — система прямого регулювання частоти обертання двигуна ( мал. 1 ). Мета управління — підтримка постійної частоти обертання маховика, керований об'єкт — двигун 1 ; дія, що управляє, — положення регулюючої заслінки дроселя 3 ; УУ — відцентровий регулювальник 2, муфта 4 якого зміщується під дією відцентрових сил при відхиленні від заданого значення частоти обертання валу 5, жорстко пов'язаного з маховиком. При зсуві муфти змінюється положення заслінки дроселя. Структурна схема розглянутого прикладу ( мал. 2 ) типова для багатьох САУ незалежно від їх фізичної природи. Описана система є замкнуту одноконтурну безперервну систему автоматичного регулювання механічної дії, що допускає лінеаризацію при дослідженні.
Промисловість випускає універсальних регулювальників, у тому числі з дією по похідній, по інтегралу (див. Корекція динамічних властивостей ), екстремальні регулювальники, для управління різними об'єктами. Спеціалізовані САУ широко застосовуються в різних областях техніки, наприклад: стежача система управління копіювально-фрезерним верстатом по жорсткому копіру; САУ металоріжучих верстатів з програмним управлінням від магнітної стрічки, перфострічки або перфокарти (переваги такого управління полягають у відносній універсальності, легкості перебудови програми і високої точності обробки деталей); система програмного управління реверсивним прокатним станом, що включає в свій контур обчислювальну машину, що управляє. У відносно повільних технологічних процесах в хімічній і нафтовій промисловості поширені багатозв'язкові САУ, що здійснюють регулювання великої кількості зв'язаних величин; так, при перегонці нафти інформація про температуру, тиск, витрату і склад нафтопродуктів отримувана від декількох сотень датчиків, використовується для формування сигналів управління десятками різних регулювальників. САУ грають важливу роль в авіації і космонавтиці, наприклад автопілот є САУ зв'язаного регулювання, а інколи і самоналагоджувальну систему. У військовій техніці застосовуються високоточні стежачі системи, що часто включають обчислювальні пристрої (наприклад, система кутового супроводу станції радіолокації). При аналізі багато фізіологічних процесів в живому організмі, таких як кровообіг, регуляція температури тіла у теплокровних тварин, рухові операції, виявляються характерні межі САУ (див. Кібернетика біологічна ).
Завдання синтезу пристроїв А. в. і аналізу процесів в керованих системах є предметом теорії автоматичного управління.
Р. С. Рутман
Теорія автоматичного управління (ТАУ) вивчає принципи побудови систем автоматичного управління і закономірності процесів, що протікають в них, які вона досліджує на динамічних моделях дійсних систем з врахуванням умов роботи, конкретного призначення і конструктивних особливостей керованого об'єкту і автоматичних пристроїв, з метою побудови працездатних і точних систем управління.
Первинне ТАУ розвивалася як теорія автоматичного регулювання (ТАР) і була одним з розділів теоретичної і технічної механіки. На цій стадії ТАУ вивчала процеси управління паровими казанами і електричними машинами, але окремо в межах лише теплотехніки і лише електротехніки. Швидкий розвиток всіх галузей техніки і промисловості супроводився вдосконаленням методів і засобів техніки управління; виявилася аналогічність процесів управління в технічних пристроях, незалежно від їх природи і призначення. З розвитком управління в техніці йшло також вивчення проблем управління в організмах і в економічних системах. Аж до середини 20 ст дослідження процесів управління в цих різнорідних об'єктах не було зв'язано. У техніці пристрої, що управляють, зовнішні по відношенню до об'єктів, створюються окремо і лише потім з'єднуються з об'єктами в єдину систему управління. На основі вивчення взаємодії цих пристроїв з об'єктами була виявлена спільність процесів управління. Саме тому ТАР зародилася в техніці і перетворилася на самостійну технічну науку. У живих організмах і в економіці органи управління складають невід'ємну частину цих об'єктів. Тут немає необхідності конструювання органів управління, що окремо діють, а вивчення всього механізму управління велося розрізнено в відповідних галузях знань без участі фахівців з управління. Проте процеси управління, що володіють певною специфікою в біології і економіці, зажадали обов'язкової колективної роботи фахівців різних галузей науки і техніки, тим більше при сучасному рівні розвитку науки, коли виявилася також і необхідність взаємного обміну знаннями. Н. Вінеру належала думка про спільність процесів управління в техніці, живих організмах і в економіці і необхідності спільної діяльності вчених різних спеціальностей (див. Кібернетика ). Цей вивід готувався тривалий час і багатьма іншими дослідниками. Було виявлено, що технічна наука — ТАР, здатна пояснити процеси управління і впливати на них не лише в техніці; сфера її вживання розширилася, але при цьому ускладнилися цілі і методи теорії, яка отримала нову назву «Теорія автоматичного управління». Для ТАР характерне завдання стабілізації заданого стану об'єкту. У ТАУ це завдання входить складовою частиною в проблему пристосування, або адаптації, яка властива живим організмам і економічним організаціям. Але і для техніки ці проблеми вельми актуальні, якщо врахувати змінність параметрів об'єктів управління, роботу їх за змінних умов, а також оцінку ефективності цій роботи в чисто економічних термінах, наприклад прибутковість або зменшення витрат праці і матеріалів. Так виникла проблема синтезу і аналізу систем автоматичного управління — основна проблема ТАУ. Рішення її вимагає вивчення динамічних властивостей САУ, для чого необхідний математичний опис поведінки всіх елементів системи в перехідних процесах. У загальному випадку процеси в об'єктах описуються системами звичайних диференціальних рівнянь або рівнянь в приватних похідних залежно від того, чи мають об'єкти зосереджені або розподілені параметри. Елементи автоматичних пристроїв також описуються системами диференціальних рівнянь. Специфічний для ТАУ подальший перехід від лінійних рівнянь до передавальних функцій — операторних виразів диференціальних і різницевих рівнянь. Передавальні функції дозволяють легко представити математичну модель системи у вигляді структурної схеми, що складається з типових динамічних ланок. ТАУ вводить поняття динамічних характеристик — передавальних функцій, частотних і тимчасових характеристик, що спрощують складання математичних моделей системи і подальші аналіз і синтез систем. Динамічний аналіз САУ з'ясовує їх працездатність і точність. Необхідною умовою працездатності САУ служить їх стійкість (див. Стійкість системи автоматичного управління). Для її дослідження розроблені критерії стійкості, що дозволяють визначати умови стійкості і необхідні запаси її по непрямих ознаках, минувши вельми важку операцію інтеграції рівнянь руху системи. Стійкість досягається зміною параметрів системи і її структури. У нелінійних САУ досліджується можливий для цих систем режим автоколивань . Якщо ж по самому принципу дії САУ, наприклад для релейних систем, ці коливання неминучі, то встановлюються допустимі параметри — амплітуда і частота автоколивань. Точність САУ оцінюється показниками, які в сукупності називається якістю управління (див. Точність систем автоматичного управління), Найважливіші показники якості САУ: статичні і динамічні погрішності і час регулювання (див. Погрішність в системі автоматичного регулювання). Ці показники визначаються порівнянням дійсного перехідного процесу зміни керованих величин з необхідним законом їх зміни; зазвичай вони вказуються для одного з типових законів зміни керованої величини. У ТАУ, так само як і при аналізі стійкості, користуються непрямими методами аналізу якості, не що вимагають вирішення вихідних рівнянь. Для цього вводяться критерії якості — непрямі оцінки показників якості (див. Якості показники системи автоматичного управління). При дії на САУ випадкових обурень найбільш поширений критерій якості динамічної точності — середня квадратична помилка. Ця величина відносно просто може бути пов'язана із статистичними характеристиками обурюючих дій і параметрами передавальної функції системи. САУ, в якій досягнутий екстремум якого-небудь показника якості, іменується оптимальною системою . Нелінійні системи володіють ширшими можливостями досягнення оптимуму певного показника якості, чим системи лінійні. Це зумовило вживання нелінійних зв'язків для підвищення якості систем управління. Аналіз системи управління встановлює властивості системи з вже заданою структурою. Побудова алгоритму управління і розробка відповідної йому структури системи, що виконує задану мету при необхідній якості управління, встановлення значень параметрів цієї системи складає вміст проблеми синтезу. До початку розробки системи управління повідомляються необхідні для цього вихідні дані: властивості керованого об'єкту, характер обурень, що діють на нього, мета управління і необхідна точність управління. До об'єкту управління відноситься його орган, що управляє, через який передається дія на об'єкт від пристрою, що управляє. Відомі характеристики органу, що управляє, відразу ж визначають характеристики виконавчого механізму пристрою, що управляє. Але на цьому обривається ланцюг частин системи управління, властивості яких визначаються однозначно їх взаємним впливом один на одного. Так вводиться поняття незмінної частини системи управління — незмінною в тому сенсі, що властивості її задані до початку конструювання алгоритму управління і, як правило, не можуть бути змінені. Задана мета управління визначає і спосіб управління. В результаті з'ясовується у загальних рисах блокова схема системи управління. В основному користуються 2 методами вирішення проблеми синтезу — аналітичним і послідовних наближень. При першому або знаходиться вигляд передавальної функції автоматичного пристрою або алгоритм управління, або при вибраній структурі вказаного пристрою встановлюються значення його параметрів, що дають екстремум критерію якості. Цей метод дозволяє відразу знайти оптимальне рішення, але він часто приводить до складними громіздким обчисленням. У другому методі по заданому критерію якості визначається передавальна функція автоматичного пристрою і потім для отриманої системи порівнюються задані показники якості з їх дійсними значеннями. Якщо наближення виявляється допустимим, розрахунок вважається закінченим і можна приступити до конструювання пристрою. Якщо ж наближення виявляється недостатнім, то змінюється вигляд передавальної функції до здобуття варіанту, що задовольняє заданим вимогам точності. При побудові складних систем управління, окрім теоретичних методів, застосовується моделювання із застосуванням аналогових і цифрових обчислювальних машин, на яких відтворюються рівняння, що описують всю систему управління в цілому, і за результатами розрахунків, що закінчуються досягши необхідних показників якості, встановлюється структура пристрою управління. Такий метод синтезу близький по ідеї до методу послідовних наближень. Моделювання дозволяє оцінити вплив таких чинників, як нелінійність обмеження координат, змінність параметрів, які ставлять майже непереборні перешкоди для аналітичного дослідження. Вживання обчислювальних машин звільняє від труднощів розрахунку. Вони також використовуються у складі САУ для виконання складних алгоритмів управління, які особливо характерні для адаптивних і оптимальних систем і систем з прогнозуванням кінцевого результату управління. Вирішення проблеми синтезу САУ сприяло появі нових ефективних принципів управління і розвитку важливих самостійних напрямів в ТАУ: оптимальне управління, статістічная динаміка і чутливість систем управління. Теорія оптимального управління дозволила встановити структури систем управління, що володіють гранично високими показниками якості при обліку реальних обмежень, що накладаються на змінні. Показники оптимальності можуть бути вельми всілякими. Вибір їх залежить від конкретно поставленого завдання. Такими показниками служать показники динамічних властивостей всієї системи в цілому, критерії економічності режимів керованих об'єктів і ін. Поширені оптимальні по швидкодії системи, які переводять об'єкт з одного стану в інше за мінімальний проміжок часу.
Статистична динаміка систем управління вивчає дію на ці системи випадкових обурень. Методи цієї теорії дозволяють синтезувати системи управління, що забезпечують мінімум динамічної погрішності, вирішувати завдання побудови тих, що згладжують і прогнозуючих стежачих систем, визначати динамічні властивості керованих об'єктів за даними досвіду при їх нормальному функціонуванні без внесення пробних обурень. Статистичні методи дослідження широко поширені для вивчення різних типів систем управління. Велике значення цих методів набувають для систем, що пристосовуються. Теорія чутливості систем управління вивчає залежність динамічних властивостей цих систем від їх змінних параметрів і характеристик. Показник чутливості служить мірою залежності вказаних властивостей від варіацій параметрів. Теорія чутливості дозволяє у ряді випадків вказати дороги здійснення беспоїськових самоналагоджувальних систем.
Останнє питання тісно пов'язане ще з одним напрямом в ТАУ, що отримав інтенсивний розвиток останніми роками, — загальною теорією адаптації, розвиненої на базі статистичних методів і методів лінійного програмування в математиці. Для ТАУ характерний тісний зв'язок, що безперервно посилюється і взаємно впливаюча, не лише з математикою, але також і з фізикою і технічними науками, що вивчають властивості об'єктів, які дозволяють створити детальні динамічні моделі об'єктів, необхідні при вирішенні завдань автоматичного управління, що ускладнилися.
Літ.: Максвелл Д. До., Вишнеградський І. А., Стодола А., Теорія автоматичного регулювання, М-код.,1949; Лернер А. Я. Введеніє в теорію автоматичного регулювання, М., 1958; Фельдбаум А. А., Обчислювальні пристрої в автоматичних системах, М., 1959; його ж. Основи теорії оптимальних автоматичних систем, М., 1963; Теорія автоматичного регулювання, під ред. В. В. Солодовникова кн. 1, М., 1967.