Варіаційні принципи механіки. Принципами механіки називаються вихідні положення, настільки загальні закономірності механічних явищ, що відображають, що з них як следствія можна отримати всі рівняння, що визначають рух механічної системи (або умови її рівноваги). В ході розвитку механіки були встановлені ряд таких принципів, кожен з яких може бути покладений в основу механіки, що пояснюється різноманіттям властивостей і закономірностей механічних явищ. Ці принципи підрозділяють на неваріаційних і варіаційних.
Неваріаційні принципи механіки безпосередньо встановлюють закономірності руху, що здійснюється системою під дією прикладених до неї сил. До цих принципів відносяться, наприклад, 2-й закон Ньютона, згідно з яким при русі будь-якої точки системи твір її маси на прискорення дорівнює сумі всіх прикладених до крапки сил, а також Д''Аламбера принцип . Неваріаційні принципи справедливі для будь-якої механічної системи і мають порівняно просте математичне вираження. Проте їх вживання обмежене лише рамками механіки, оскільки у вирази принципів безпосередньо входить таке чисто механічне поняття, як сила. Істотно також наступне. У більшості завдань механіки розглядається рух скованих систем, тобто систем, переміщення яких обмежені зв'язками (див. Зв'язки механічні ) . Прикладами таких систем є всілякі машини і механізми, а також наземний транспорт і ін., де зв'язками є підшипники, шарніри, троси і тому подібне, а для наземного транспорту — ще і полотно дороги або рейки. Щоб вивчити рух скованої системи, виходячи з неваріаційних принципів, треба і ефект дії зв'язків замінити деякими силами, званими реакціями зв'язків. Але величини цих реакцій заздалегідь невідомі, оскільки вони залежать від того, чому дорівнюють і де прикладені задані (активні) сили, що діють на систему, такі, наприклад, як сили тяжіння, пружності пружин, тяги і ін., а також від того, як при цьому рухається сама система. Тому до складених рівнянь руху увійдуть додаткові невідомі величини у вигляді реакцій зв'язків, що зазвичай істотно ускладнює весь процес рішення.
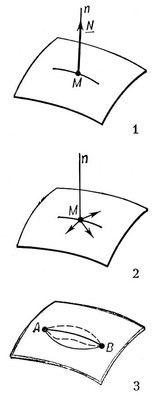
Перевага Ст п. м. полягає в тому, що з них відразу виходять рівняння рухи відповідної механічної системи, що не містять невідомих реакцій зв'язків. Досягається це тим, що ефект дії зв'язків враховується не заміною їх невідомими силами (реакціями), а розглядом тих переміщень або рухів (або ж приростів швидкостей і прискорень), які точки цієї системи можуть мати за наявності даних зв'язків. Наприклад, якщо точка М-коду рухається по даній гладкій (ідеальною) поверхні, що є для неї зв'язком ( мал. 1 ), ту дію цього зв'язку можна врахувати, замінивши зв'язок заздалегідь невідомою по величині реакцією N, направленою у будь-який момент часу по нормалі Mn до поверхні (оскільки по цьому напряму зв'язок не дає переміщатися крапці). Але ефект цього ж зв'язку можна врахувати, встановивши, що для крапки в даному випадку при будь-якому її положенні можливі лише такі елементарні переміщення, які перпендикулярні до нормалі Mn ( мал. 2 ); такі переміщення називаються можливими переміщеннями . Нарешті, ефект того ж зв'язку може бути охарактеризований і тим, що при цьому рух крапки з деякого положення А в положення В можливо лише по будь-якій кривій АВ, лежачою на поверхні яка є зв'язком ( мал. 3 ); такі рухи називаються кінематично можливими.
Вміст Ст п. м. полягає в тому, що вони встановлюють властивості (ознаки), що дозволяють відрізнити достеменне, тобто що фактично відбувається під дією заданих сил рух механічної системи, від тих або інших кінематично можливих її рухів (або ж стан рівноваги системи від інших можливих її станів). Зазвичай ці властивості (ознаки) полягають в тому, що для дійсного руху деяка фізична величина, залежна від характеристик системи, має найменше значення в порівнянні з її значеннями у всіх можливих рухах, що розглядаються кінематично. При цьому Ст п. м. можуть відрізнятися один від одного виглядом вказаної фізичної величини і особливостями можливих рухів, що розглядаються кінематично, а також особливостями самих механічних систем, для яких ці Ст п. м. справедливі. Використання Ст п. м. вимагає вживання методів варіаційного числення .
За формою Ст п. м. розділяють на так званих диференціальних, в яких встановлюється, чим дійсний рух системи відрізняється від рухів кінематично можливих в кожен даний момент часу, і інтегральні, в яких ця відмінність встановлюється для переміщень, що здійснюються системою за який-небудь кінцевий проміжок часу.
Диференціальні Ст п. м. в рамках механіки є загальнішими і практично справедливі для будь-яких механічних систем. Інтегральні Ст п. м. в їх найбільш споживаному вигляді справедливі лише для так званих консервативних систем, тобто систем, в яких має місце закон збереження механічної енергії. Проте в них, на відміну від диференціальних Ст п. м. і неваріаційних принципів, замість сил входить така фізична величина, як енергія, що дозволяє розповсюдити ці Ст п. м. на немеханічні явища, роблячи їх важливими для всієї теоретичної фізики.
До основних диференціальних Ст п. м. відносяться: 1) можливих переміщень принцип, що встановлює умову рівноваги механічної системи з ідеальними зв'язками; згідно з цим принципу, положення рівноваги механічної системи відрізняються від всіх інших можливих для неї положень тим, що лише для положень рівноваги сума елементарних робіт всіх прикладених до системи активних сил на будь-якому можливому переміщенні системи дорівнює нулю. 2) Д''Аламбера — Лагранжа принцип, згідно з яким дійсний рух механічної системи з ідеальними зв'язками відрізняється від всіх кінематично можливих рухів тим, що лише для дійсного руху в кожен момент часу сума елементарних робіт всіх прикладених до системи активних сил і всіх сил інерції на будь-якому можливому переміщенні системи дорівнює нулю. У цих Ст п. м. даною фізичною величиною є робота сил.
До диференціальних Ст п. м. відноситься також Гауса принцип (принцип найменшого примусу, в якому даною фізичною величиною є, так зване, «примус», що виражається через задані сили і прискорення точок системи, а також тісно до нього що примикає Герца принцип (принцип найменшої кривизни).
До інтегральних Ст п. м. відносяться, так звані, принципи найменшого (стаціонарного) дії, згідно з якими достеменними серед можливих рухів системи, що розглядаються кінематично, між двома її положеннями є те, для якого фізична величина, звана дією, має мінімальне значення. Різні форми цих Ст п. м. відрізняються один від одного вибором величини дії і особливостями порівнюваних між собою кінематично можливих рухів системи (див. Найменшої дії принцип ) .
Як неваріаційні, так і В. п. м. були встановлені в процесі вивчення властивостей механічних систем і закономірностей їх руху. Оскільки механічні, як і ін. фізичні явища, підпорядковані багатьом закономірностям, то для відповідних механічних систем виявилися справедливим цілий ряд принципів, в тому числі і В. п. м., і якщо будь-який з них прийняти за початковий, то з нього як следствія виходять не лише рівняння руху даної системи, але і всі інші, справедливі для цієї системи, принципи.
Застосовуються Ст п. м. як для складання в найбільш простий формі рівнянь руху механічних систем, так і для вивчення загальних властивостей цих рухів. При відповідному узагальненні понять вони використовуються також в механіці суцільних середовищ, термодинаміці, електродинаміці, квантовій механіці, теорії відносності і ін.
Літ.: Варіаційні принципи механіки. [Сб. ст.], під ред. Л. П. Полака, М., 1959; Бухгольц Н. Н., Основний курс теоретичної механіки, 5 видавництво, ч. 2, М., 1969; Голдстейн Р. Класична механіка, пер.(переведення) з англ.(англійський), М., 1957.