Кінематика (від греч.(грецький) kínema, родовий відмінок kinematos — рух), розділ механіки, присвячений вивченню геометричних властивостей рухів без врахування їх мас і сил, що діють на них. Те, що викладається нижче відноситься до До. рухів, що розглядаються в класичній механіці (рух макроскопічних тіл з швидкостями, малими в порівнянні з швидкістю світла). ПРО ДО. рухів з швидкостями, близькими до швидкостей світла, див.(дивися) Відносності теорія, а про рухи мікрочасток — Квантова механіка .
Встановлювані в До. методи і залежності використовуються при кінематичних дослідженнях рухів, зокрема при розрахунках передач рухів в різних механізмах, машинах і ін., а також при вирішенні завдань динаміки . Залежно від властивостей об'єкту, що вивчається, До. розділяють на До. крапки, До. твердого тіла і К. безперервного змінного середовища (тіла, що деформується, рідини, газу).
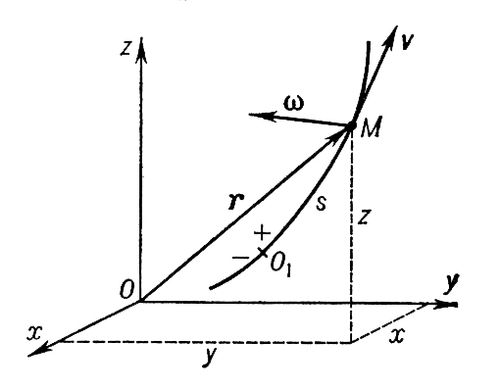
Рух будь-якого об'єкту в До. вивчають по відношенню до деякого тіла (тіло відліку); з ним зв'язують так звану систему відліку (осі х, в, z на мал. 1 ), за допомогою якої визначають положення рухомого об'єкту відносно тіла відліку в різні моменти часу. Вибір системи відліку в До. довільний і залежить від цілей дослідження. Наприклад, при вивченні руху колеса вагону по відношенню до рейки систему відліку пов'язують із землею, а при вивченні руху того ж колеса по відношенню до кузова вагону — з кузовом і т.д. Рух даного об'єкту вважається заданим (відомим), якщо відомі рівняння звані рівняннями рухи (або графіки, таблиці), що дозволяють визначити положення цього об'єкту по відношенню до системи відліку у будь-який момент часу.
Основне завдання До. полягає у встановленні (за допомогою тих або інших математичних методів) способів завдання руху крапок або тіл і у визначенні по рівняннях їх рухів відповідних кінематичних характеристик руху, таких, як траєкторії, швидкості і прискорення рухомих крапок, кутові швидкості і кутові прискорення тіл, що обертаються, і ін. Для завдання руху крапки користуються одним з 3 способів: природним, координатним або векторним:
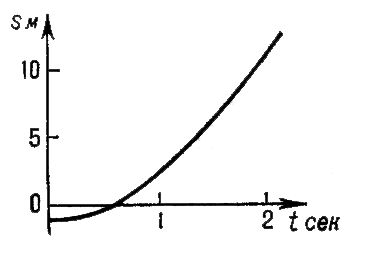
а) природний (або траєкторний), вживаний, коли відома траєкторія крапки по відношенню до вибраної системи відліку. Положення, крапки визначається відстанню s = O 1 M від вибраного на траєкторії початку відліку O 1 , виміряним уподовж дуги траєкторії і узятим з відповідним знаком ( мал. 1 ), а закон руху дається рівнянням s = f ( t ), що виражає залежність s від часу t. Наприклад, якщо задано, що s = 3t 2 — 1, то в початковий момент часу t 0 = 0, S 0 = — 1 м-коду (крапка знаходиться зліва від початку Про на відстані 1 м-код ) , в момент t 1 = 1 сік, S 1 = 2 м-код (крапка праворуч від O 1 на відстані 2 м-код ) і т.д. Залежність s від t може бути також задана графіком руху, на якому у вибраному масштабі відкладені уздовж осі t час, а уздовж осі s — відстань ( мал. 2 ), або таблицею, де в одному стовпці даються значення t, а в іншому відповідні ним значення s (подібний спосіб застосовується, наприклад, в залізничному розкладі руху поїзда).
би) Координатний, при якому положення крапки відносно системи відліку визначається якими-небудь трьома координатами, наприклад прямокутними декартовими х, в, z, а закон руху задається 3 рівняннями х = f 1 ( t ) , в = f 2 ( t ) , z = f 3 ( t ) . Виключивши з цих рівнянь час t, можна знайти траєкторію крапки.
в) Векторний, при якому положення крапки по відношенню до системи відліку визначається її радіус-вектором r , проведеним від початку відліку до рухомої крапки, а закон руху дається векторним рівнянням r = r ( t ) . Траєкторія крапки — годограф вектора r.
Основними кінематичними характеристиками рухомої крапки є її швидкість і прискорення, значення яких визначаються по рівняннях руху через перші і другі похідні за часом від s або від х, в, z, або від r (див. Швидкість, Прискорення ) .
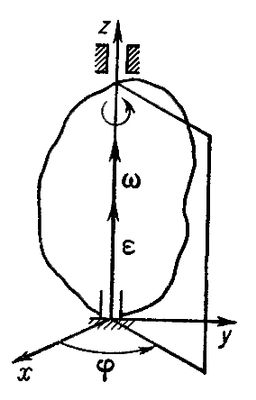
Способи завдання руху твердого тіла залежать від вигляду, а число рівнянь руху — від числа мір свободи тіла (див. Мір свободи число ) . Простими є поступальна хода і обертальний рух твердого тіла. При поступальній ході всі точки тіла рухаються однаково, і його рух задається і вивчається так само, як рух однієї крапки. При обертальному русі довкола нерухомої осі z ( мал. 3 ) тіло має одну міру свободи; його положення визначається кутом повороту j, а закон руху задається рівнянням j = f ( t ) . Основними кінематичними характеристиками є кутова швидкість w=dj/dt і кутове прискорення e = dw/dt тіла. Величини w і e зображаються у вигляді векторів, направлених уздовж осі обертання. Знаючи w і e, можна визначити швидкість і прискорення будь-якої точки тіла.
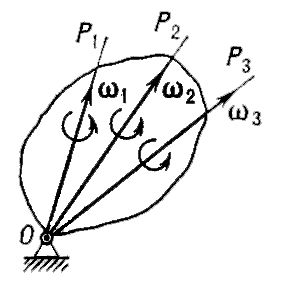
складнішим є рух тіла, що має одну нерухому крапку і що володіє 3 мірами свободи (наприклад, гіроскоп, або дзига). Положення тіла відносно системи відліку визначається в цьому випадку якими-небудь 3 кутами (наприклад, Ейлера кутами: кутами прецессиі, нутації і власного обертання), а закон руху — рівняннями, що виражають залежність цих кутів від часу. Основними кінематичними характеристиками є миттєва кутова швидкість w і миттєве кутове прискорення e тіла. Рух тіла складається з серії елементарних поворотів що довкола безперервно міняють свій напрям миттєвих осей обертання ОР , проходящих через нерухому точку Про ( мал. 4 ).
найзагальнішим випадком є рух вільного твердого тіла, що має 6 мір свободи. Положення тіла визначається 3 координатами однієї з його крапок, званих полюсом (у завданнях динаміки за полюс береться центр тяжіння тіла), і 3 кутами, вибираними так само, як для тіла з нерухомою крапкою; закон руху тіла задається 6 рівняннями, що виражають залежності названих координат і кутів від часу. Рух тіла складається з поступального разом з полюсом і обертального довкола цього полюса, як довкола нерухомої крапки. Таким, наприклад, є рух в повітрі артилерійського снаряда або літака, що здійснює фігури вищого пілотажу, рух небесних тіл і ін. Основними кінематичними характеристиками є швидкість і прискорення поступальної частини руху, рівні швидкості і прискоренню полюса, і кутова швидкість і кутове прискорення обертання тіла довкола полюса. Всі ці характеристики (як і кінематичні характеристики для тіла з нерухомою крапкою) обчислюються по рівняннях руху; знаючи ці характеристики, можна визначити швидкість і прискорення будь-якої точки тіла. Окремим випадком розглянутого руху є плоськонаправленноє (або плоске) рух твердого тіла, при якому всі його крапки рухаються паралельно деякій плоскості. Подібний рух здійснюють ланки багатьох механізмів і машин.
В До. вивчають також складний рух крапок або тіл, тобто рух, що розглядається одночасно по відношенню до двох (і більш) систем відліку, що взаємно переміщаються. При цьому одну з систем відліку розглядають як основну (її ще називають умовно нерухомою), а систему відліку, що переміщається по відношенню до неї, називають рухливою; у загальному випадку рухливих систем відліку може бути декілька.
При вивченні складного руху крапки її рух, а також швидкість і прискорення по відношенню до основної системи відліку називають умовно абсолютними, а по відношенню до рухливої системи — відносними. Рух найрухливішої системи відліку і всіх незмінно пов'язаних з нею точок простору по відношенню до основної системи називають переносним рухом, а швидкість і прискорення тієї точки рухливої системи відліку, з якою в даний момент збігається рухома крапка, називають переносний швидкістю і переносним прискоренням. Наприклад, якщо основну систему відліку пов'язати з берегом, а рухливу з пароплавом, що йде по річці, і розглянути кочення кульки по палубі пароплава (вважаючи кульку крапкою), то швидкість і прискорення кульки по відношенню до палуби будуть відносними, а по відношенню до берега — абсолютними; швидкість же і прискорення тієї точки палуби, якої в даний момент стосується кулька, будуть для нього переносними. Аналогічна термінологія використовується і при вивченні складного руху твердого тіла.
Основні завдання До. складного руху полягають у встановленні залежностей між кінематичними характеристиками абсолютного і відносного рухів крапки (або тіла) і характеристиками руху рухливої системи відліку, тобто переносного руху. Для крапки ці залежності є наступними: абсолютна швидкість крапки дорівнює геометричній сумі відносної і переносної швидкостей, тобто
n а = n oтн + n пер ,
а абсолютне прискорення крапки дорівнює геометричній сумі трьох прискорень — відносного, переносного і поворотного, або коріолісова (див. Коріоліса прискорення ) , тобто
w а = w oтн +w пер +w кори .
Для твердого тіла, коли всі складені (тобто відносні і переносні) рухи є поступальними, абсолютний рух також є поступальним з швидкістю, рівній геометричній сумі швидкостей складених рухів. Якщо складені рухи тіла є обертальними довкола осей, пересічних в одній крапці (як, наприклад, в гіроскопа), то результуючий рух також є обертальним довкола цієї крапки з миттєвою кутовою швидкістю, рівній геометричній сумі кутових швидкостей складених рухів. Якщо ж складеними рухами тіла є і поступальні, і обертальні, то результуючий рух в загальному випадку складатиметься з серії миттєвих гвинтових рухів (див. Гвинтовий рух ) .
В До. безперервною середовища встановлюються способи завдання руху цього середовища, розглядається загальна теорія деформацій і визначаються так звані рівняння нерозривності, що відображають умови безперервності середовища.