Гіроскоп (від гиро... і ...скоп ), тверде тіло, що швидко обертається, вісь обертання якого може змінювати свій напрям в просторі. Р. володіє рядом цікавих властивостей, спостережуваних в небесних тіл, що обертаються, в артилерійських снарядів, у дитячої дзиги, в роторів турбін, встановлених на судах, і ін. На властивостях Р. засновані всілякі пристрої або прилади, широко вживані в сучасній техніці для автоматичного управління рухом літаків, морських судів, ракет, торпед і ін. об'єктів, для визначення горизонту або географічного меридіана, для виміру поступальних або кутових швидкостей рухомих об'єктів (наприклад, ракет) і багато що ін.
Властивості Р. виявляються при виконанні двох умов: 1) вісь обертання Р. повинна мати можливість змінювати свій напрям в просторі; 2) кутова швидкість обертання Р. довкола своєї осі має бути дуже велика в порівнянні з тією кутовою швидкістю, яку матиме сама вісь при зміні свого напряму.
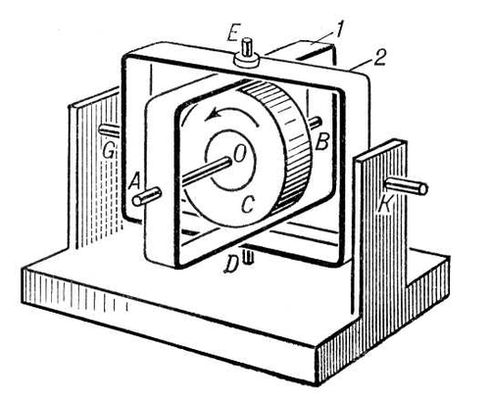
Простим Р. є дитяча дзига, що швидко обертається довкола своєї осі ОА ( мал. 1 ); вісь ОА може змінювати своє положення в просторі, оскільки її кінець А не закріплений. В Р. вживаних в техніці, вільний поворот осі Р. можна забезпечити, закріпивши се в рамках (кільцях) 1, 2 т.з. карданова підвісу ( мал. 2 ), що дозволяє осі АВ зайняти будь-яке положення в просторі. Такий Р. має 3 міри свободи: він може здійснювати 3 незалежних повороту довкола осей АВ , DE і GK , пересічних в центрі підвісу Про, який залишається по відношенню до підстави 3 нерухомим. Якщо центр тягарю Р. збігається з центром Про, то Р. називається астатичним (урівноваженим), інакше — важким.
Перша властивість урівноваженого Р. з трьома мірами свободи полягає в тому, що його вісь прагне стійко зберігати в світовому просторі додане їй первинний напрям. Якщо ця вісь спочатку направлена на яку-небудь зірку, то при будь-яких переміщеннях підстави приладу і випадкових поштовхах вона продовжуватиме вказувати на цю зірку, міняючи своє орієнтування відносно земних осей. Вперше це властивість Р. використовував французький учений Л. Фуко для експериментального доказу обертання Землі довкола її осі (1852). Звідси і само назва «Г.», що в переведенні означає «спостерігати обертання».
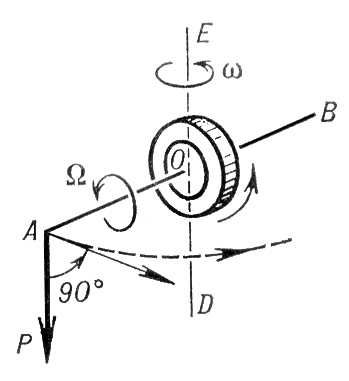
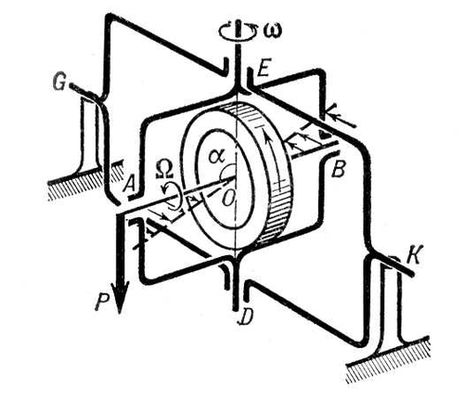
Друга властивість Р. виявляється, коли на його вісь (або рамку) починають діяти сила або пара сил, прагнучі привести вісь в рух (тобто що створюють момент, що обертає відносно центру підвісу). Під дією сили Р ( мал. 3 ) кінець А осі АВ Р. відхилюватиме не у бік дії сили, як це було б при необертальному роторі, а в напрямі, перпендикулярному до цієї сили; в результаті Р. разом з рамкою 1 почне обертатися довкола осі DE , притому не прискорено, а з постійною кутовою швидкістю. Це обертання називається прецессией; воно відбувається тим повільніше, чим швидше обертається довкола своєї осі АВ сам Г. Еслі в якийсь момент часу дія сили припиниться, то одночасно припиниться прецессия і вісь АВ миттєво зупиниться, тобто процесійний рух Р. безінерційний.
Величина кутової швидкості прецессиі визначається по формулі:
де М-код — момент сили Р центру Про, а = á АОЄ W — кутова швидкість власного обертання Р. довкола осі АВ , I — момент інерції Р. відносно тієї ж осі, h = АТ(автономна область) — відстань від точки додатка сили до центру підвісу Г.; друга рівність має місце, коли сила Р паралельна осі DE . З формули (1) безпосередньо видно, що прецессия відбувається тим повільніше, чим більше W, точніше, чим більше величина H = IW , називається власним кінетичним моментом Г. Как знайти напрям прецессиі Р. див.(дивися) мал. 4 .
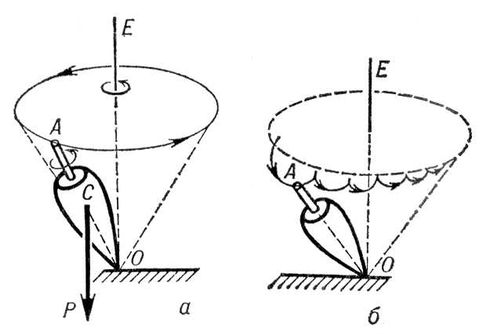
Поряд з прецессией вісь Р. при дії на неї сили може ще здійснювати т.з. нутацію — невеликі, але швидкі (зазвичай непомітні на око) коливання осі біля її середнього напряму. Розмахи цих коливань в Р., що швидко обертається, дуже малі і із-за неминучої наявності опорів швидко затухають. Це дозволяє при рішенні більшості технічних завдань нехтувати нутацією і побудувати т.з. елементарну теорію Р., прецессию, що враховує лише, швидкість якої визначається формулою (1). Процесійний рух можна спостерігати у дитячої дзиги ( мал. 5 , а), для якої роль центру підвісу грає точка опори О. Еслі вісь такої дзиги поставити під кутом АОЄ до вертикалі і відпустити, то вона під дією сили тяжіння Р відхилятиметься не у бік дії цієї сили тобто не вниз, а в перпендикулярному напрямі, і починає процесувати довкола вертикалі. Прецессия дзиги також супроводиться непомітними на око нутационнимі коливаннями, швидко затухаючими із-за опору повітря. Під дією тертя об повітря власне обертання дзиги поступово сповільнюється, а швидкість прецессиі w відповідно зростає. Коли кутова швидкість обертання дзиги стає менше певної величини, він втрачає стійкість і падає. У дзиги, що повільно обертається, нутационниє коливання можуть бути досить помітними і, складаючись з прецессией, істотно змінити картину руху осі дзиги: кінець А осі описуватиме ясно видиму хвилеподібну або петлеподібну криву, то відхиляючись від вертикалі, то наближаючись до неї ( мал. 5 , би).
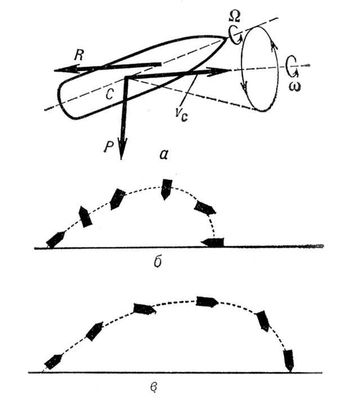
Інший приклад процесійного руху дає артилерійський снаряд (або куля). На снаряд при його русі, окрім сили тяжіння, діють сили опору повітря, рівнодійна R яких направлена приблизно протилежно швидкості центру тяжіння снаряда і прикладена вище за центр тяжіння ( мал. 6 , а). Необертальний снаряд під дією сили опору повітря «перекидатиметься» і його політ стане безладним ( мал. 6 , би); при цьому значно зросте опір руху, зменшиться дальність польоту і снаряд не попаде в мету головною частиною. Снаряд, що обертається ж, володіє всіма властивостями Р., і сила опору повітря викликає відхилення його осі не у бік дії цієї сили, а в перпендикулярному напрямі. В результаті вісь снаряда повільно процесує довкола прямою, по якій направлена швидкість v з , тобто довкола дотичною до траєкторії центру тяжіння снаряда ( мал. 6 , в), що робить політ правильним і забезпечує на низхідній гілці траєкторії попадання снаряда в ціль головною частиною.
Наша планета Земля також є гігантським Р., що здійснює прецессию (детальніше за див.(дивися) Прецессия в астрономії).
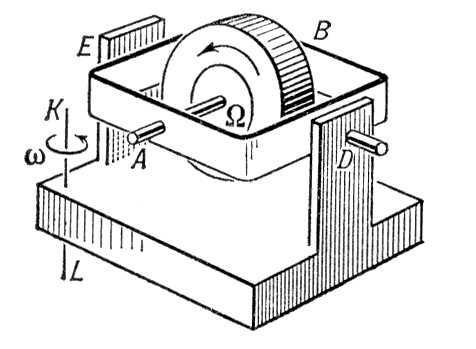
Якщо вісь АВ ротора Р. закріпити в одній рамці, яка може обертатися по відношенню до підстави приладу довкола осі DE ( мал. 7 ), то Р. матиме можливість брати участь лише в двох обертаннях — довкола осей АВ і DE , тобто матиме дві міри свободи. Такий Р. не володіє жодним з властивостей Р. з трьома мірами свободи, проте у нього є інша дуже цікава властивість: якщо підставі Р. повідомити вимушене обертання з кутовою швидкістю w довкола осі KL , створюючою кут а з віссю АВ , то на вісь ротора з боку підшипників А і В почне діяти пара сил з гіроскопічним моментом
М-коду гир = Iww sin а . (2)
Ця пара прагне найкоротшим дорогою встановити вісь ротора Р. паралельно осі KL , причому так, щоб і обертання ротора, і вимушене обертання були видні такими, що відбуваються в одну і ту ж сторону.
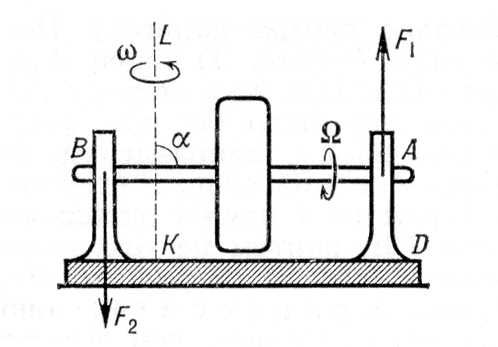
Розглянемо, нарешті, ротор, вісь АВ якого безпосередньо закріплена в підставі D ( мал. 8 ). Якщо ця підстава нерухома, то вісь не може змінювати свій напрям в просторі і, отже, ротор жодними властивостями Р. не володіє. Проте якщо обертати підставу довкола деякої осі KL з кутовою швидкістю w , то за попереднім правилом вісь АВ прагнутиме встановитися паралельно осі KL . Цьому руху перешкоджають підшипники у яких закріплена вісь. В результаті ротор давитиме на підшипники А і В з силами F 1 і F 2 , званими гіроскопічними силами.
На морських судах і гвинтових літаках є багато частин, що обертаються: вал двигуна, ротор турбіни або динамомашини, грібні або повітряні гвинти і т.п. При розворотах літака або судна, а також при хитавиці на підшипники, в яких укріплені ці частини, що обертаються, діють вказані гіроскопічні сили і їх необхідно враховувати при відповідних інженерних розрахунках; величини цих сил можуть досягати декількох тонн, і, якщо кріплення підшипників не будуть належним чином розраховані, то станеться аварія.
Теорія Р. є найважливішим розділом динаміки твердого тіла, що має нерухому крапку. Перерахованими властивостями Р. є следствія законів, яким підкоряється рух такого тіла. Перше з властивостей Р. з трьома мірами свободи є прояв закону збереження кінетичного моменту, а друга властивість — прояв однієї з теорем динаміки, згідно якої зміна в часі кінетичного моменту тіла дорівнює моменту сили, що діє на нього.
Гіроскопи в техніці. Вживані в техніці Р. виконують зазвичай у вигляді маховичка з потовщеним ободом, вагою від декількох Г до десятків кГ , закріпленого в кардановому підвісі. Щоб повідомити Р. швидке обертання, його роблять ротором швидкохідного електромотора постійного або змінного струму. У авіації застосовуються Р. з ротором у вигляді повітряної турбіни, що приводиться в рух струменем повітря. Інколи Р. виконують у формі кулі (куля-г.) з підвісом на повітряній плівці, утворюваною подачею стислого повітря. У ряді конструкцій застосовують поплавцевий Р., ротор якого поміщений в кожух, плаваючий в рідині; цим розвантажуються підшипники кожуха і значно зменшується момент тертя в них.
Пристрій конкретних гіроскопічних приладів грунтується на тих або інших властивостях Р. з трьома або двома мірами свободи. Властивість Р. з трьома мірами свободи незмінно зберігати напрям своїй осі в просторі використовується при конструюванні приладів для автоматичного управління рухом літаків (наприклад, автопілота ), ракет, морських судів, торпед і т.п. Р. в цих приладах грає роль чутливого елементу, реєструючого відхилення рухомого об'єкту від заданого курсу. Одночасно прилад містить стежачу систему, що уловлює сигнал про відхилення, підсилює його і передавальну силовому пристрою (мотору), який і повертає об'єкт на заданий курс, зазвичай за допомогою керма. Друга властивість Р. з трьома мірами свободи — властивість процесувати під дією прикладеної сили — належить в основу Р. напряму (курсового Р.) і важливих навігаційних приладів: гірокомпаса — приладу, що визначає напрям географічного меридіана, і гіровертикалі (або гирогорізонта) — приладу, що визначає напрям дійсній вертикалі (горизонту).
При запуску ракети необхідно з високою мірою точності знати швидкість її вертикального зльоту. З цією, здавалося б, дуже важким завданням, теж легко справляється Р.
, що процесує, В гіроскопічних приладах часто використовують і властивості Р. з двома мірами свободи. До таких приладів відносяться авіаційний покажчик повороту, а також деякі види гіростабілізаторів, зокрема пристрою для просторової стабілізації об'єкту (наприклад, штучного супутника Землі). Детальніше про всіх цих і ін. пристроях див.(дивися) Гіроскопічні пристрої .
Сучасна техніка вимагає від багатьох гіроскопічних приладів дуже високої точності, що викликає великі технологічні труднощі при їх виготовленні. Наприклад, в деяких приладів при вазі ротора порядка 1 кГ для забезпечення потрібної точності зсув центру тяжіння від центру підвісу не повинен перевищувати доль мікрона, інакше момент сили тяжіння викличе небажану прецессию (відхід) осі Г. Кроме того, на точність свідчень приладів з Р. в кардановому підвісі впливає тертя в осях. Все це привело до розробки Р., заснованих не на чисто механічних, а на інших фізичних принципах (див. також Квантовий гіроскоп, Вібраційний гіроскоп ).
Літ.: Микола Е. Л., Гіроскоп і деякі його технічні вживання, М. — Л., 1947 (популярний виклад); Граммель Р., Гіроскоп, його теорія і вживання пер.(переведення) з йому.(німецький), т. 1—2, М., 1952; Булгаков Би. Ст, Прикладна теорія гіроскопів, 2 видавництва, М., 1955; Ішлінський А. Ю., Механіка гіроскопічних систем, М., 1963.