Гіростабілізатор , гіроскопічний пристрій, призначене для стабілізації окремих об'єктів або приладів, а також для визначення кутових відхилень об'єктів. За принципом дії Р. діляться на безпосередніх, силових і індикаторних.
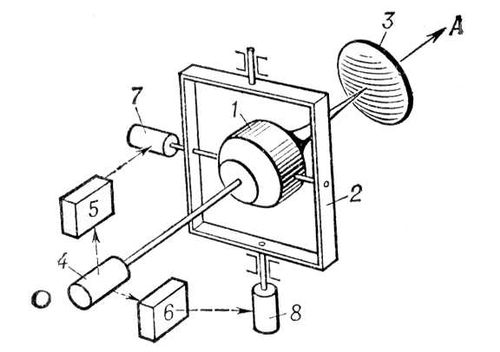
Безпосередні Р. — пристрої, в яких безпосередньо використовуються стабілізуючі властивості трьохстатечного гіроскопа . Застосовуються як заспокоювачі бортової хитавиці корабля, стабілізаторів вагону однорельсової ж. д.(залізниця) і ін. (вага і габарити подібних Р. вельми істотні), а також для стабілізації чутливих елементів систем управління. Наприклад, Р. ( мал. 1 ), що складається з гирокамери 1 з ротором, встановленою в зовнішньому кардановому кільці (рамі) 2 , здійснює безпосередню стабілізацію антени 3 і координатора 4 . Координатор виробляє сигнали, пропорційні кутам відхилення осі антени від заданого напряму ОА . Ці сигнали через підсилювачі-перетворювачі 5 і 6 — поступають на датчики моментів 7 і 8 системи корекції, що здійснює автоматичне стеження осі антени за вказаним напрямом. Подібні Р. називають гіроскопічними стежачими системами.
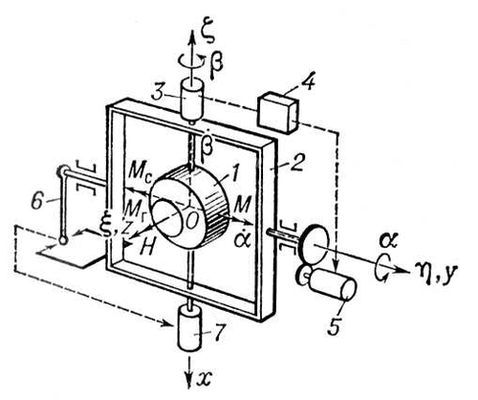
Силові Р. (гирорами) — електромеханічні пристрої, що містять, окрім гіроскопів, спеціальні двигуни для подолання дії на об'єкт, що стабілізується, зовнішніх обурюючих моментів. Застосовуються на кораблях, літальних апаратах і ін. об'єктах для стабілізації окремих приладів і пристроїв. Крім того, за принципом силової гіроскопічної стабілізації працюють деякі типи гіроскопів напряму, гіровертикалей і комбінованих пристроїв, званих гироазімутгорізонтамі. Силові Р. залежно від числа гіроскопів в рамі можуть бути одно- і двухгироськопнимі, а по числу осей стабілізації — одно-, двух- і тривісними. В одноосного силового Р. з одним гіроскопом ( мал. 2 ) основним елементами є гирокамера 1 з ротором; рама 2, що грає роль зовнішнього карданова кільця і жорстко пов'язана з об'єктом, що стабілізується; датчик кута 3 встановлений на осі прецессиі Ox ; підсилювач 4 ; стабілізуючий двигун 5 , призначений для додатка відносно осі стабілізації Oh моментів, компенсуючих зовнішні обурюючі моменти, що діють на раму; маятник-коректор 6 і датчик моментів 7, системи корекції Г. Прі, що є елементами, дії зовнішнього обурюючого моменту М-кодом , прагнучого обернути раму довкола осі Oh , гирокамера 1 по властивостях гіроскопа почне процесувати довкола осі Ox; при цьому виникає гіроскопічний момент М-коду г , протидіючий моменту М-коду . Надалі при повороті гирокамери довкола осі Ox на деякий кут b датчик кута 3 через підсилювач 4 включить стабілізуючий двигун 5 , що прикладає відносно осі Oh момент стабілізації М з , протилежний моменту М-коду . В результаті гирокамера почне процесувати у зворотному напрямі і зупиниться (при постійній величині М-коду ) в положенні, для якого М з + М-код = 0 . Т. о., в силовому Р. гіроскоп здійснює стабілізацію лише в перший момент; надалі її забезпечує стабілізуючий двигун, що дозволяє стабілізувати значні маси при порівняно невеликій вазі і габаритах самого гіроскопа. На практиці застосовують також двухгироськопниє Р., що володіють рядом переваг в порівнянні з одногироськопнимі.
Поєднання два одноосних Р. дає двовісний Р., що стабілізує платформу відносно плоскості горизонту; цей Р. може бути також використаний як гіровертикаль силового типа. Поєднання три одноосних Р. дає тривісний силовий гіростабілізатор (гироазімутгорізонт) — пристрій, що складається з гіроскопа напряму (гироазімута) і гіровертикалі (гирогорізонта). Він служить для виміру трьох кутів, що визначають положення об'єкту, і застосовується на кораблях і літаках. Тривісний Р. використовується також для просторової стабілізації деякої платформи (гіростабілізована платформа). Подібні Р. застосовують в інерціальних навігаційних системах .
Індикаторні Р. — системи автоматичного регулювання, в яких гіроскопічні пристрої, встановлені на об'єкті (наприклад, платформі), що стабілізується, є чутливими або задаючими елементами, що визначають положення об'єкту і стежачими системами, що управляють; стабілізація ж об'єкту (платформи) здійснюється за допомогою стежачих систем. Як чутливі елементи, що реагують на кутові швидкості або кути відхилення платформи, застосовують двоступеневі (наприклад, поплавцеві інтегруючі) гіроскопи і гиротахометри або трьохстатечні астатичні гіроскопи. Індикаторні Р. використовують в інерціальних навігаційних системах, що встановлюються на кораблях і літальних апаратах.