Інерціальна навігаційна система, система інерціальної навігації, навігаційний пристрій, в основу роботи якого покладені класичні (ньютонівські) закони механіки. У І. н. с. вихідною (головною) системою відліку, по відношенню до якої виробляються інерціальні виміри, служить інерціальна (абсолютна, тобто нерухома відносно зірок) система. За допомогою І. н. с. визначають координати, швидкість, прискорення і ін. основні параметри руху об'єкту (літака, ракети, космічного корабля, надводних і підводних судів і ін.). І. н. с. мають перед іншими навігаційними системами (див. Радіонавігаційна система ) великі і важливі переваги — універсальність вживання, можливість визначення основних параметрів руху, автономність дії, абсолютну перешкодозахищену. Ці якості визначили І. н. с. як найбільш перспективну навігаційну систему.
Принцип дії І. н. с. полягає в моделюванні (виставі) поступальної ходи об'єкту, що характеризується зміною в часі прискорення, швидкості і координат, подібним процесом руху сприймаючого елементу (маси) просторового (трикомпонентного) акселерометра (у загальному випадку з компенсацією гравітаційного прискорення). Рівняння руху сприймаючого елементу в інерціальній системі координат є основним рівнянням інерціального методу визначення параметрів руху; у загальному випадку має вигляд:
де — прискорення, вимірюване акселерометром; — радіус-вектор точки М-коду (центру тяжіння сприймаючого елементу) в інерціальній системі координат; — сила тяжіння одиниці маси сприймаючого елементу в точці М-коду (прискорення тяжіння).
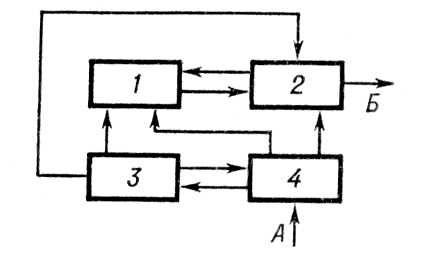
Суть інерціального методу ( мал. ) полягає у вимірі акселерометром вихідного параметра (прискорення) і інтеграції основного рівняння: одинарному — для визначення швидкості, подвійному — для визначення координат. Орієнтування вимірювальних осей акселерометров по заданих напрямах виробляється вільними або керованими (по сигналах від акселерометров) гіроскопічними пристроями (гіроскопом, гіростабілізатором, гирорамой і ін.) або астростабілізаторами, а також поєднанням цих засобів. Для інтеграції основного рівняння використовуються гіроскопічні, електромеханічні і ін. інтегратори . І. н. с. містить будівника (інерціальна вертикаль) або обчислювач напряму вертикалі місця. Інерціальна вертикаль є високоточною вертикаллю і не обурюється (не відхиляється від вертикалі місця) за наявності горизонтальних прискорень.
І. н. с. розрізняють по ряду ознак: по орієнтації напрямів осей чутливості інерціальних вимірників (з довільною орієнтацією, з орієнтацією за зірками, по осях, жорстко пов'язаних з об'єктом, з незмінною орієнтацією відносно небесного тіла, наприклад Землі, з горизонтальною орієнтацією і др.); за способом побудови вертикалі місця (з аналітичною, або розрахунковою, вертикаллю, з інерціальним будівником вертикалі); по наявності стабілізованої платформи (із стабілізованою гіроскопічною або астроплатформою, бесплатформенниє) і ін.
І. н. с. вельми складні, дорогостоящи. Термін служби їх менше, ніж в звичайних гіроскопічних приладів. Для правильного функціонування І. н. с. перед стартом об'єкту потрібно ввести початкові дані по координатах пункту старту і швидкості, виробити орієнтування інерціальних вимірників. Точність некоректованих І. н. с. залежить від часу. Тому можливість здобуття інформації від І. н. с., що задовольняє заданим вимогам, обмежена в часі. Так, за годину польоту кращі зразки І. н. с. мають погрішність у визначенні координат приблизно 1,5—5 км. Для зменшення погрішностей і розширення можливостей використання застосовують різні способи корекції від радіонавігаційних, радіолокацій і астронавігаційних засобів.
Літ.: Принципи інерціальної навігації, пер.(переведення) з англ.(англійський), під ред. Ст А. Боднера, М., 1965; Помикаєв І. І., Інерціальний метод виміру параметрів руху літальних апаратів, М., 1969.