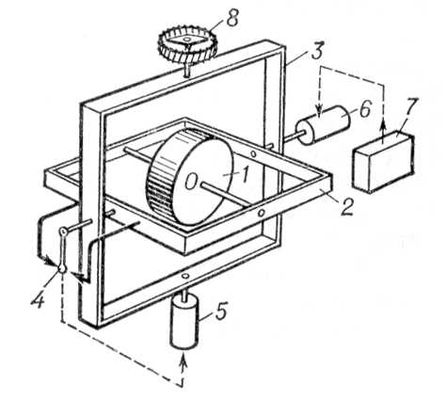
Гіроскоп напряму , гироазімут, курсовий гіроскоп, гирополукомпас, гіроскопічний пристрій для визначення кутів рискання (зміни курсу) і кутів повороту об'єкту довкола вертикальної осі. При узгодженні Р. н. з плоскістю меридіана (наприклад, за даними якого-небудь компаса) він вказує поточне значення курсу об'єкту. Р. н. є трьохстатечній астатичний (урівноважений) гіроскоп, забезпечений горизонтальною і азимутною системами корекції (см. мал.(малюнок) ). Горизонтальна система корекції, що утримує внутрішнє кардановий кільце 2 (вісь гіроскопа 1 ) в плоскості горизонту, складається з маятника-коректора 4 , що визначає кут відхилення осі гіроскопа від плоскості горизонту, і датчика моментів 5 , що прикладає до гіроскопа відповідні моменти, що коректують. Азимутна система корекції, утримуюча вісь гіроскопа, в заданому азимутному напрямі (тобто під заданим кутом, наприклад, до плоскості меридіана) складається з датчика моментів 6 і обчислювального пристрою 7, що виробляє момент азимутної корекції. При цьому враховуються поправки на обертання Землі і на рух об'єкту відносно Землі. Азимутна корекція Р. н. може також здійснюватися від чутливого елементу, що володіє вибірковістю по відношенню до напряму, що стабілізується, наприклад від магнітної стрілки (див. Гіромагнітний компас ). Потенціометр 8 служить для знімання кутів рискання і повороту об'єкту довкола вертикальної осі. Погрішності Р. н. характеризуються відходами осі гіроскопа в азимуті, які можуть складати від одиниць до десятих доль градуса в годині
Р. н. використовують для визначення кутів рискання і повороту літальних апаратів і кораблів, а також для короткочасної вказівки курсу. Р. н. може застосовуватися і як чутливий елемент системи автоматичної стабілізації курсу об'єкту, наприклад в автопілоті літального апарату, в автоматі курсу торпеди і ін.