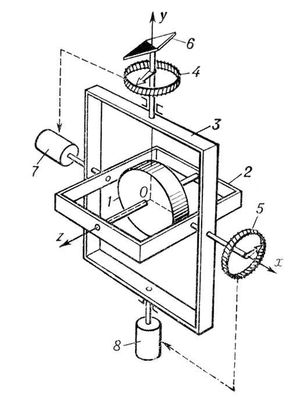
Гіромагнітний компас , гіроскопічний пристрій, вживане на рухомих об'єктах і призначене для визначення курсу об'єкту по відношенню до плоскості магнітного меридіана. Р. до. є трьохстатечній астатичний гіроскоп, забезпечений азимутною і горизонтальною системами корекції; азимутна корекція, чутливим елементом якої є магнітна стрілка, утримує вісь гіроскопа 1 в плоскості магнітного меридіана; горизонтальна корекція утримує внутрішнє кардановий кільце 2 в положенні, перпендикулярному зовнішньому 3 . Горизонтальна система корекції складається з потенціометра 5 ( мал. ) і датчика моментів 8 . Азимутна система корекції складається з магнітної стрілки 6 , потенціометра 4 і датчика моментів 7. Принцип роботи систем корекції Р. до. аналогічний такому в гіровертикалі з маятниковою корекцією. Погрішність Р. до. може досягати декількох градусів. Прилад широко поширений в авіації, застосовується також в морському флоті.
Якщо магнітна система встановлена далеко від гіроскопа, то зв'язок між ними здійснюється з допомогою стежачої системи (дистанційний Р. до.). Існують прилади, в яких замість магнітної системи застосовується індукційний чутливий елемент. Це т.з. гироїндукционний компас. У нього, на відміну від Р. до., відсутній азимутний гіроскоп і свідчення магнітного курсу визначаються за допомогою індукційного чутливого елементу, що складається з пермаллоєвого сердечника з обмоткою, вісь якого встановлюється в плоскості магнітного меридіана. Для підвищення точності приладу індукційний елемент стабілізується відносно плоскості горизонту установкою його на гирокамере гіровертикалі.