Гіровертикаль , гирогорізонт, гіроскопічний пристрій для визначення напряму дійсній вертикалі або плоскості горизонту, а також кутів нахилу об'єкту відносно цієї плоскості. Простим негіроскопічним приладом такого роду служить фізичний маятник (схил). Проте він не придатний для рухомого об'єкту, т.к. не встановлюватиметься уздовж достеменної вертикалі при обертальній або прискореній поступальній ході об'єкту (він буде декілька відхилятися від вертикалі і при рівномірній поступальній ході об'єкту унаслідок обертання Землі); крім того, при хитавиці у нього можуть виникнути вимушені коливання з великими розмахами. Р. значною мірою вільна від цих недоліків і тому широко застосовується на літаках, кораблях і ін. рухомих об'єктах.
Як проста Р. може служити трьохстатечною астатичний гіроскоп, вісь якого прагне зберігати свій напрям в світовому просторі. Проте по відношенню до Землі, що обертається, ця вісь з часом змінюватиме свій напрям. Тому без пристроїв, що коректують, такий прилад може служити лише короткочасним покажчиком напряму (зокрема, вертикалі). Подібні прилади, називають гирогорізонтом і гировертікантом, застосовуються у балістичній ракеті для визначення кутів її відхилення у вертикальній і горизонтальній плоскості (кути тангажа, рискання і крену). Для тривалого утримання осі астатичного гіроскопа у вертикальному положенні використовують ті або інші системи корекції.
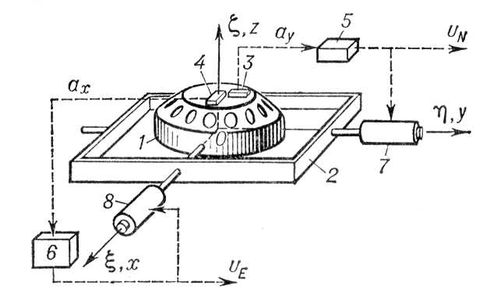
Р. з маятниковою системою корекції ( мал. 1 ) — трьохстатечною астатичний гіроскоп, в якому система корекції складається з маятників-коректорів 4, 5, що фіксують кути відхилення осі гіроскопа від вертикалі місця, і датчиків моментів 6, 7, що прикладають до гіроскопа відповідні моменти, що коректують, викликають прецессию осі гіроскопа до вертикалі місця. Потенціометри 8 і 9 служать для визначення кутів нахилу об'єкту відносно плоскості горизонту. Погрішності Р. цього типа, визначувані відхиленнями осі гіроскопа, від вертикалі місця можуть складати від доль градуса до одиниць кутових хвилин. У прецизійних Р. для підвищення їх точності враховуються поправки на обертання Землі і власний рух об'єкту.
При установці на кораблі Р. з маятниковою корекцією визначають кути бортової і кильової хитавиці, а на літальному апараті — кути крену і тангажа. Застосовуються в системах автоматичної стабілізації різних рухливих об'єктів, в заспокоювачах хитавиці корабля, для стабілізації літального апарату і ін., а також для визначення викривлення бурових свердловин шахт і т.п.
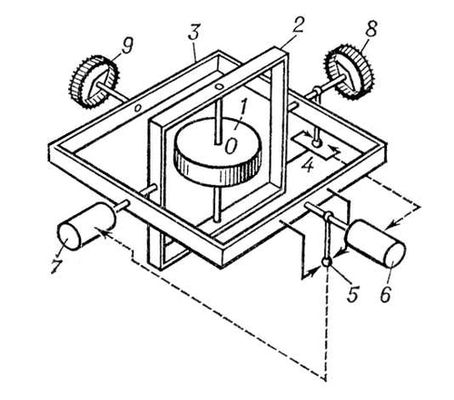
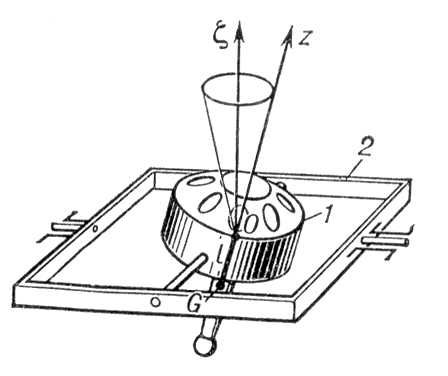
Іншим типом Р., що не вимагає вживання системи корекції, є гиромаятник, т. с. гіроскоп з 3 мірами свободи, центр тяжіння G якого лежить на осі ротора на деякій відстані l від точки опори Про ( мал. 2 ). При відхиленні осі Oz гіроскопа від вертикалі Oz , вісь Oz під дією сили тяжіння Р починає процесувати довкола Oz , описуючи конус з вершиною в точці О. Т. до. власний кінетичний момент гіроскопа Н дуже великий, то період прецессиі
T = 2ph/lp (1)
(де l = OG) також великий, що робить прилад практично нечутливим до коливань об'єкту. У реальному приладі процесійні коливання осі Oz погашаються спеціальним демпфером і вісь Oz гіроскопа приходить в положення, близьке до вертикалі. Проте щоб прилад володів необхідною точністю при прискореному русі (маневруванні) об'єкту, період Т повинен задовольняти умові М. Шулера (бути рівним періоду коливань математичного маятника, довжина якого дорівнює радіусу Землі), тобто складати 84,4 мін , що до цих пір практично здійснити не удалося. У реалізованих конструкціях Т зазвичай ~ 10—20 мін , унаслідок чого подібні Р. при маневруванні об'єкту мають значні погрішності. Гиромаятникі застосовують в секстанті для стабілізації відносно плоскості горизонту його оптичні системи і в деяких корабельних системах стабілізації, використовуваних переважно при постійних значеннях швидкості і курсу корабля.
Приладом, що дозволяє визначати з високою мірою точності напрям вертикалі при прискореному русі об'єкту, на якому встановлений прилад, є гироїнерциальная вертикаль ( мал. 3 ). У ній, окрім гіроскопів, використовуються акселерометри і обчислювальні пристрої (інтегратори), при цьому здійснюється штучне моделювання маятника з періодом, рівним періоду М. Шулера. Гироїнерциальная вертикаль складається з астатичного трьохстатечного гіроскопа, на гирокамере 1 якого розташовані акселерометри 3, 4 (у реальних схемах акселерометри встановлюють на гіростабілізованій платформі). Вимірювані акселерометрамі прискорення , що здаються a x і a в об'єкту уздовж горизонтальних осей Ох і Оу поступають в інтегратори 5, 6; їх вихідні сигнали (швидкості v E і v N уздовж осей Ох і Оу ) вводяться на датчики моментів 7, 8, моменти, що прикладають до гіроскопа, корекції, які викликають прецессию осі гіроскопа Oz до вертикалі. При відповідному виборі коефіцієнти пропорційності між сигналом з інтегратора і величиною моменту корекції період прецессиі виявляється рівним періоду Шулера. Завдяки цьому пристрій володіє високою точністю при маневруванні об'єкту і його погрішності не перевершують декілька кутових хвилин. Гироїнерциальниє вертикалі широко використовуються в інерціальних навігаційних системах, що встановлюються на кораблях і літальних апаратах.