Гірокомпас , механічний покажчик напряму дійсного (географічного) меридіана, призначений для визначення курсу об'єкту, а також азимута (пеленга) орієнтованого напряму. Переваги Р. в порівнянні з магнітним компасом полягають в тому, що він вказує напрям географічного (а не магнітного) меридіана, що на його свідчення істотно менше, ніж на магнітний компас, впливають металеві маси (залізо, сталь), що переміщаються, і електромагнітні поля і що його точність в умовах маневрування і коливань об'єкту значно вища. Принцип дії Р. заснований на використанні властивостей гіроскопа і добового обертання Землі; його ідея була запропонована французьким вченим Л. Фуко.
Гірокомпас Фуко є двоступеневій астатичний гіроскоп, вісь якого переміщається в плоскості горизонту і завдяки тому, що виникає із-за обертання Землі гіроскопічному моменту прагне поєднатися з плоскістю меридіана. Г. Фуко не знайшов вживання на рухливих об'єктах, схильних до коливань, але його ідея була використана при розробці деяких зразків наземних Р.
На рухливих об'єктах широко застосовуються одно- і двороторні Р., засновані на використанні трьохстатечних гіроскопів.
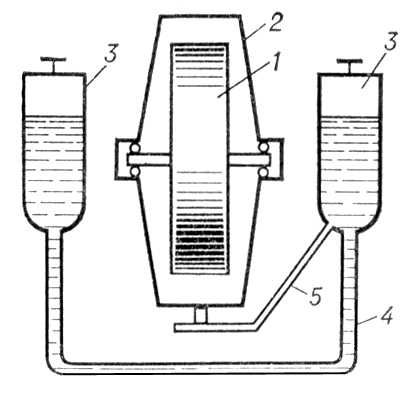
В одинроторному мореплавному Р. використовується трьохстатечною гіроскоп, центр тяжіння якого зміщений в його екваторіальній плоскості нижче за точку підвісу, тобто позиційний гіроскоп. Залежно від способу створення маятникового ефекту розрізняють Р. з маятником, Р. з ртутними судинами, Р. з непрямою корекцією. У Р. з маятником ( мал. 1 ) ротор 1 поміщений в гирокамеру 2 , до нижньої частини якої підвішений вантаж 3 . Гирокамера встановлена в зовнішньому кардановому кільці (на мал. не показано), вісь обертання якого розташована вертикально. Коли вісь АВ ротора не знаходиться в плоскості меридіана (відхилена на схід або на захід), вона, прагнучи відповідно до властивостей трьохстатечного гіроскопа зберігати свій напрям по відношенню до зірок, унаслідок обертання Землі відхилятиметься від плоскості горизонту (наприклад, її кінець В , якщо він відхилений на схід, підводитиметься, як би стежачи за сходженням зірок). Разом з віссю AB відхилятиметься і гирокамера 2 з вантажем 3 відносно плоскості горизонту. В результаті відносний точки підвісу виникне момент сили тяжіння, який викличе процесійний рух осі АВ до плоскості меридіана. У своєму русі вісь АВ «проскочить» плоскість меридіана і тоді під дією моменту сили тяжіння вона почне процесувати у зворотному напрямі і т.д. Після погашення цих А коливань спеціальним демпфером вісь АВ встановлюється в плоскості меридіана.
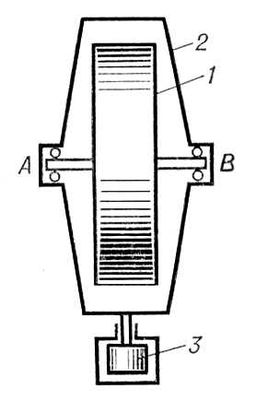
В Р. з ртутними судинами ( мал. 2 ) ротор 1 і гирокамера 2 відбалансували так, що їх загальний центр тяжіння поєднаний з точкою підвісу. З гирокамерой пов'язана система сполучених посудин 3 , частково заповнених ртуттю. До правого судині прикріплена т.з. лапа 5 , що пов'язує судини з гирокамерой. При відхиленні осі гіроскопа від плоскості горизонту надлишок ртуті в одній з судин обумовлює додаток до гіроскопа моменту сили тяжіння, аналогічного відповідному моменту в Р. з маятником.
В Р. з непрямою корекцією використовується трьохстатечною астатичний гіроскоп, на гирокамере якого встановлений маятник (акселерометр), що фіксує кут відхилення осі гіроскопа від плоскості горизонту. На підставі інформації про це вугілля в приладі формуються сигнали моментів корекції, які прикладаються до гіроскопа за допомогою відповідних датчиків моментів, встановлених на осях карданова підвісу гіроскопа. Подібні прилади можуть також працювати в режимі гіроскопа напряму.
З одинроторних Р. застосовуються в основному Р. з ртутними судинами.
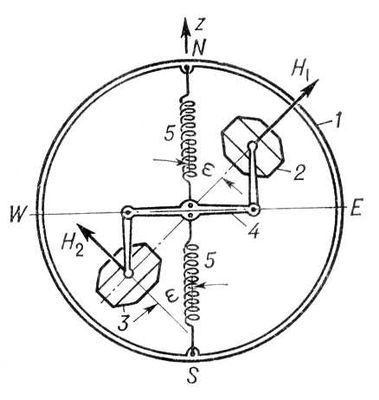
Двороторний Г. Чувствітельний елемент цього Р. ( мал. 3 ) — гіросфера, або поплавець, є порожнистою сферою 1 . У гіросфері поміщені гіроскопи 2 і 3 , гідравлічний заспокоювач для погашення власних коливань і ін. елементи. Осі власного обертання гіроскопів 2 і 3 розташовані горизонтально, а осі прецессиі — вертикально і пов'язані з шарнірним механізмом спарником 4 , який сполучений пружинами 5 з корпусом гіросфери. У вихідному положенні (при необертальних роторах) осі гіроскопів складають з напрямом NS гіросфери рівні кути Е=45° . Центр тяжіння гіросфери знаходиться на її вертикальній осі нижче за її геометричний центр, що забезпечує, як і в одинроторному Р., необхідний маятниковий момент. Гіросфера поміщена в рідину і тому в підвісі має місце лише в'язке тертя. Для забезпечення невозмущаємості Р. прискореннями об'єкту параметри системи підбирають так, щоб період процесійних коливань гіросфери за відсутності загасання складав 84,4 мін . Наявність в Р. двох гіроскопів істотно знижує погрішності приладу при хитавиці корабля. Погрішності Р. при прямому курсі і постійній швидкості ходу корабля не перевищують декількох десятих доль градуса. Р. вельми широко поширені на кораблях морського флоту.
Різновид Р. — гирогорізонт-компас, призначений для визначення курсу корабля і кутів відхилення його відносно плоскості горизонту.