Кінематика механізмів, розділ теорії машин і механізмів, в якому вивчають геометричну сторону руху частин (ланок) механізму, нехтуючи зухвалими його причинами. Дослідження До. м. грунтуються на положенні про те, що будь-який механізм складається з рухливо сполучених твердих тіл — ланок, рухи яких визначаються рухом одного або декількох ланок, званих ведучими.
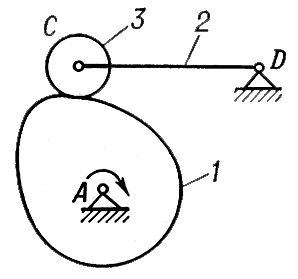
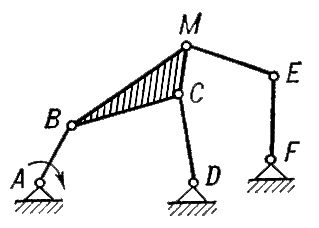
До. м. вирішує завдання кінематичного аналізу і кінематичного синтезу (див. Синтез механізмів ) . Основні завдання кінематичного аналізу: визначення положень ланок, траєкторій окремих точок механізму, кутових швидкостей і прискорень ланок, лінійних швидкостей і прискорень окремих точок механізму. Для вирішення кожним з цих завдань мають бути задані постійні геометричні параметри механізму, що визначають його кінематичні властивості і закони руху провідних ланок. Наприклад, для плоского шарнірного механізму ( мал. 1 ) мають бути відомі відстані між центрами шарнірів і закон руху провідної ланки АВ. Для кулачкового механізму ( мал. 2 ) мають бути задані профіль кулачка 1 і закон його руху, радіус ролика 3, відстані між центрами шарнірів З і D, А і D. Положення ланок визначають графічними і аналітичними методами.
простіші графічні методи полягають в наступному. Якщо для механізму ( мал. 1 ) відоме положення ланки АВ і відстані між центрами шарнірів, можна положення всіх останніх ланок визначити зарубками циркуля. Таким чином, завдання для плоских механізмів завжди може бути зведена до визначення точок пересічення плоских кривих. Графічні побудови для просторових механізмів ускладнюються, т.к. оні пов'язані з визначенням ліній і точок пересічення просторових фігур. Проте в межах точності графічних побудов завжди можна побудувати положення всіх ланок плоских і просторових механізмів будь-якої складності.
Аналітичні методи дозволяють визначати положення ланок із заздалегідь заданою точністю. Завдання зводиться до вирішення системи нелінійних рівнянь. Для типових механізмів розроблені програми обчислень на ЕОМ(електронна обчислювальна машина).
Траєкторії окремих точок механізму визначають зазвичай спільно з визначенням положень ланок, причому виконується графічна побудова або аналітичне дослідження лише тих траєкторій, від вигляду яких залежить рух робочих органів механізму. Траєкторії, що описуються точками механізму, вельми всілякі і в деяких випадках є складні плоскі або просторові криві. Наприклад, траєкторія, що описується точкою М-коду ( мал. 1 ), є кривій алгебри 6-го порядку. Траєкторії крапок, лежачих на ланці ME, представляють вже криві 14-го порядку.
Визначення швидкостей ланок і окремих точок механізмів — найбільш розроблений розділ До. м., що має в своєму розпорядженні графічні методи кінематичних діаграм і планів швидкостей і аналітичний метод. Для визначення швидкостей якої-небудь крапки будують діаграму зміни дорозі цієї крапки за часом, використовуючи дані, отримані при визначенні положень ланок, а потім, застосовуючи графічне диференціювання, будують діаграму зміни швидкості за часом (див. Графічні обчислення ). Це метод найбільш простий, проте характеризується невеликою точністю. Метод планів швидкостей застосовний для плоских і просторових механізмів. При побудові планів швидкостей використовують співвідношення між векторами швидкостей різних точок механізму. Точність методу планів швидкостей, як і всякого графічного методу, обмежена, тому при дослідженні механізмів, для яких потрібна підвищена точність кінематичного розрахунку, переважне вживання аналітичних методів, які завжди можна звести до системи лінійних рівнянь.
Прискорення крапок механізму визначають по планах прискорень і аналітичним методом (вирішення систем лінійних рівнянь). Метод кінематичних діаграм для визначення прискорень, як правило, не застосовується, оскільки його точність залежить від точності графічного диференціювання, заздалегідь побудованої діаграми зміни швидкості за часом, тобто при рішенні, можливо, накопичення помилок. Для деяких швидкохідних механізмів визначають не лише прискорення 1-го порядку, але і прискорення 2-го порядку, які інколи називають ривками. Якщо крапка здійснює прямолінійний рух, то прискорення 2-го порядку дорівнює першій похідній від прискорення 1-го порядку за часом або третьою похідною від дороги за часом. Прискорення 2-го порядку знаходять за планом ривків або аналітичним методом (вирішення системи лінійних рівнянь).
Завдання кінематичного синтезу механізмів є зворотними розглянутим завданням кінематичного аналізу. Шуканими величинами в них є постійні параметри механізму, які визначаються за заданими кінематичними умовами, тобто по траєкторіях деяких точок ланок механізму, швидкості і прискоренні ланок і окремих крапок. Завдання синтезу механізмів відрізняються більшою складністю, чим завдання кінематичного аналізу.
Літ.: Артобольовський І. І., Теорія механізмів, 2 видавництва, М., 1967; Добровольський Ст Ст, Теорія механізмів, 2 видавництва, М. 1953.