станція Радіолокації (РЛС), радіолокатор, радар, пристрій для спостереження за різними об'єктами (цілями) методами радіолокації . Основні вузли РЛС — передавальний і приймальний пристрої, розташовані в одному пункті (т.з. поєднана РЛС) або в пунктах, віддалених один від одного на деяку (зазвичай значне) відстань (двух- і багатопозиційні РЛС); у РЛС, вживаних для пасивній радіолокації, передавач відсутній. Антена може бути загальною для передавача і приймача (в поєднаної РЛС) або можуть застосовуватися роздільні антени (в багатопозиційних РЛС). Важлива складова частина приймального пристрою РЛС (після власне приймача) — світловий індикатор на електроннопроменевій трубці (ЕЛТ), а в сучасних (середини 70-х рр.) РЛС поряд з індикатором — ЦВМ(цифрова обчислювальна машина), що автоматизує багато операцій по обробці прийнятих сигналів. Основні характеристики РЛС: точність вимірів, що вирішує здатність, граничні значення ряду параметрів (максимальна і мінімальна дальність дії, сектор і час огляду і ін.), перешкодостійкість. До основних характеристик відносять також мобільність РЛС, її масу, габарити, потужність електроживлення, термін служби, кількість обслуговуючого персоналу і багато ін. експлуатаційних параметри.
Поява і розвиток РЛС. Перші РЛС були станціями виявлення літаків. 5 стаціонарних імпульсних РЛС було встановлено на південно-західному побережжі Великобританії в 1936. Вони працювали на порівняно довгих (метрових) хвилях, були вельми громіздкі і не могли виявляти літаки, що летіли на малій висоті. Проте незабаром ланцюжок таких станцій був встановлений уздовж всього англійського побережжя Ла-маншу; вона показала свою ефективність при віддзеркаленні нальотів німецької авіації під час 2-ої світової війни 1939—45. У США дослідна імпульсна РЛС була встановлена на кораблі і прошла всесторонні випробування в 1937. Після цього роботи із створення РЛС різного призначення отримали в США бурхливий розвиток, і на початок 40-х рр. були створені РЛС сантиметрового діапазону хвиль для виявлення літаків, що летять на великому видаленні.
В СРСР перші досліди по радіовиявленню літаків були проведені в 1934. Промисловий випуск перших РЛС, прийнятих на озброєння, був початий в 1939. Ці станції (РУСЯВИЙ-1) з безперервним випромінюванням, що модулюється звуковою частотою, малися в своєму розпорядженні ланцюжком уздовж деякої лінії і дозволяли виявляти літак, що пересікає цю лінію. Вони були застосовані на Карельському перешийку під час радянсько-фінляндської війни 1939—40 і на Кавказі під час Великої Вітчизняної війни 1941—45. Перша імпульсна установка радіолокації була випробувана в 1937. Промисловий випуск імпульсних РЛС (РУСЯВИЙ-2, «Редут») почався в 1940. Ці станції мали одну пріємо-передавальну антену і поміщалися разом з джерелом електроживлення в кузові автомашини. Вони дозволяли виявляти літаки при круговому огляді повітряного простору на відстанях (залежно від висоти польоту) до 150 км. В 1940 Ленінградським фізико-технічним інститутом (керівник робіт Ю. Б. Кобзарев ) було закінчене споруда стаціонарною РЛС для системи ППО(протиповітряна оборона). Антени станції розташовувалися на великій висоті (20 м-код ), що забезпечувало велику дальність виявлення (~ 250 км. ) і давало можливість виявляти порівняно літаки, що низько летять. Під час Великої Вітчизняної війни, окрім станцій «Редут», було розгорнуто виробництво надійних портативних станцій «Пегматіт», які можна було легко перевозити в упакованому вигляді і швидко встановлювати в будь-якому приміщенні. Згодом станції «Пегматіт» були вдосконалені так, що вони дозволили визначати, окрім дальності і азимута літака, його висоту. В кінці війни вдосконалення РЛС відбувалося у напрямі як підвищення дальності їх дії і точності вимірів, так і автоматизації окремих операцій за допомогою автоматичних стежачих систем для виміру дальності і стеження по кутових координатах (у станціях гарматного наведення), автоматичних рахункових пристроїв (у станціях для «сліпого» бомбометання) і т.д.
Після 2-ої світової війни, з розвитком авіації (підвищенням висоти, швидкості польоту і маневреності літаків), з'явилася необхідність створення РЛС, здатних працювати в умовах складної обстановки — при великому кількості об'єктів і дії умисних перешкод. Підвищення точності виміру координат (в т.ч. завдяки новим методам їх виміру), сполучення РЛС з обчислювальними машинами і загальною системою радіоуправління снарядами-ракетами істотно змінили технічні і тактичні параметри РЛС, що стали найважливішою ланкою автоматизованої системи управління засобами ППО(протиповітряна оборона).
Основні типи РЛС. РЛС розрізняють перш за все по конкретних завданнях, що виконуються ними автономно або в комплексі засобів, з якими вони взаємодіють, наприклад: РЛС систем управління повітряним рухом, РЛС виявлення або наведення зенітних керованих ракет систем ППО(протиповітряна оборона), РЛС для пошуку космічних літальних апаратів (КЛА) і зближення з ними, літакові РЛС кругового або бічного огляду і т.д. Специфіка вирішення окремих завдань і їх широкий спектр привели до великої різноманітності типів РЛС. Наприклад, для підвищення точності стрілянини по літаках в голівках зенітних снарядів встановлюють мініатюрні РЛС, вимірюючі відстань від снаряда до об'єкту і що приводять в дію (на певній відстані) детонатор снаряда; для своєчасного запобігання літаку про наближення з боку його «хвоста» ін. літака на нім встановлюють РЛС «захисту хвоста», що автоматично виробляє попереджувальний сигнал.
Залежно від місця установки РЛС розрізняють наземні, морські, літакові, супутникові РЛС і т.д. РЛС підрозділяють також по технічних характеристиках: по частоті (робочому діапазону довжин хвиль), що несе, — на РЛС метрового, дециметрового (ДМ), сантиметрового (СМ), міліметрового (ММ) і ін. діапазонів; по методах і режимах роботи — на РЛС імпульсні і з безперервним випромінюванням, когерентні і з некогерентним режимом роботи і т.д.; по параметрах найважливіших вузлів РЛС — передавача, приймача, антени і системи обробки прийнятих сигналів, а також по ін. технічним і тактичним параметрам РЛС.
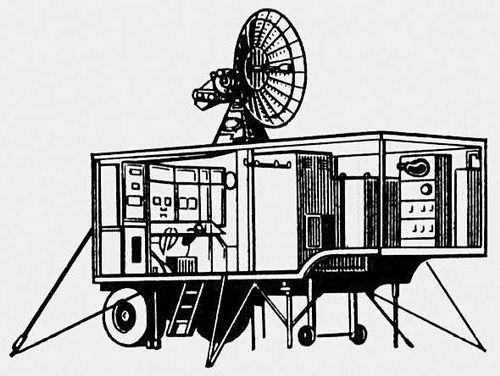
РЛС точного виміру координат, називаються станціями гарматного наведення (СОН), визначають з високою мірою точність координати (азимут, кут місця, дальність) повітряних, морських і наземних об'єктів ( мал. 1 ). Для зенітної артилерії поява цих станцій означала технічну революцію. Різке підвищення точності виміру координат, в першу черга кутових, стало можливим після освоєння СМ діапазону хвиль, що дозволив формувати в СОНах за допомогою антен високонаправлене випромінювання радіохвиль. При цьому різко підвищилося використання випромінюваної потужності в потрібних напрямах і удалося значною мірою позбавитися від впливу Землі, місцевих предметів і ряду ін. перешкод роботі РЛС.
Використання СМ діапазону дозволило створити панорамні літакові РЛС кругового огляду земної поверхні ( мал. 2 ), що зіграли важливу роль під час 2-ої світової війни при рішенні задачі «сліпого» бомбометання, а також при пошуку і знищенні на морі підводних човнів. Для цих станцій характерна висока міра розрізнення окремих деталей на земній поверхні (мостів, споруд, залізниць і т.д.) або на морі (перископів підводних човнів і т.п.).
Освоєння СМ діапазону привело також до створення РЛС виявлення літаків і наведення на них літаків-перехоплювачів, які, використовуючи дані, отримані від РЛС далекого виявлення, або працюючи автономно, виявляють літаки і одночасно вимірюють їх координати — дальність, азимут і висоту польоту (наприклад, т.з. методом v-світівши). Для реалізації цього методу застосовують 2 антени, одна з яких має діаграму спрямованості, вузьку по азимуту і широку у вертикальній плоскості, а інша — діаграму спрямованості такий же форми, але відхилену від вертикальної плоскості на кут, рівний 45° ( мал. 3 ). При спільному обертанні обох антен азимут і дальність об'єкту визначаються за допомогою першої антени, а висота — по проміжку часу, через який об'єкт фіксується другою антеною.
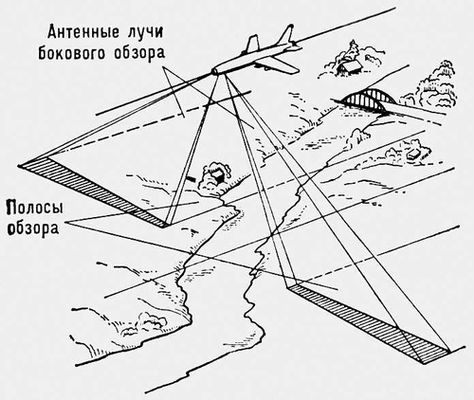
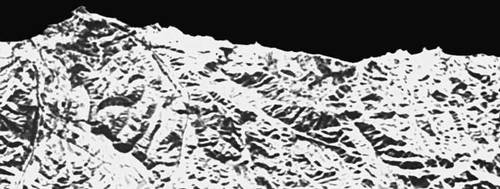
РЛС бічного огляду, призначені для картографування земної поверхні, вирішення завдань повітряної розвідки і т.д., мають ту, що високу вирішує здатність, що визначає якість зображення радіолокації, його детальність. Це досягається або значним збільшенням розміру антени, що розташовується уздовж фюзеляжу літака, що дозволяє збільшити роздільну здатність в порівнянні з панорамними РЛС кругового огляду на порядок, або вживанням методу штучного раськрива антени ( мал. 4 ), що дозволяє наблизитися до роздільної здатності оптичних засобів спостереження ( мал. 5 ); при цьому роздільна здатність не залежить від дальності спостереження і довжини хвилі зондуючого сигналу. У РЛС з штучним раськривом антени часто використовують складні оптичні системи багатоканальної (по дальності) обробки сигналів з когерентним накопиченням їх в кожному каналі. Сполучення таких систем з фотографічними пристроями дозволяє отримувати високоякісний запис інформації.
РЛС систем ПРО крупних міст і промислових об'єктів (у США, за даними іноземного друку) утворюють комплекс радіолокації, що включає РЛС виявлення, супроводи і пізнання цілей і РЛС наведення протіворакет, що працюють головним чином в СМ, рідше в ДМ діапазонах хвиль ( мал. 6 ). Така багатофункціональна РЛС містить декілька сотень передавачів з імпульсною потужністю кожного від 0,1 до 1 Вт ,фазовану антенні грати, роботою якої управляє ЦВМ(цифрова обчислювальна машина), декілька тис. параметричних підсилювачів, встановлених у вхідних ланцюгах приймачів. За кордоном існують проекти наземних систем ПРО на основі вживання потужних лазерів, призначених для поразки цілей. Такі системи повинні працювати спільно із засобами автоматичного стеження і фокусування лазерного променя високої інтенсивності, у тому числі з РЛС грубого стеження, що забезпечує здобуття орієнтовних даних про мету, що наближається, з РЛС на лазерах для точного стеження за метою (див. Оптична локація ) і з системою розпізнавання дійсної мети за наявності помилкових цілей. Завдяки можливості здобуття вузького променя і малим габаритам РЛС на лазерах їх передбачається застосовувати також на КЛА і супутниках.
РЛС стеження за штучними супутниками 3емлі (ІСЗ) і виміри їх траєкторій розрізняють перш за все по складу і кількості вимірюваних параметрів. У простій однопараметричній РЛС обмежуються виміром лише доплеровськой частоти (див. Доплера ефект ), по характеру зміни якої в місці розташування РЛС визначають період звернення ІСЗ(штучний супутник Землі) і ін. параметри його орбіти. Орбіту ІСЗ(штучний супутник Землі) можна точно визначити, застосувавши на трасі польоту ІСЗ(штучний супутник Землі) декілька РЛС СМ діапазону, наприклад точних імпульсних РЛС — радіодалекомірів, що працюють з відповідачем на борту ІСЗ(штучний супутник Землі), в якого нестабільність затримки відповіді імпульсу відносно мала. Ці РЛС з параболічними антенами забезпечують в режимі стеження визначення кутових координат ІСЗ(штучний супутник Землі) з точністю порядка декількох кутових хвилин при конічному скануванні і порядка 1 кутову хвилину при моноімпульсному методі. Т. о., ці трьохпараметричні РЛС є деяким розвитком СОН, відрізняючись від них побудовою основного каналу автодалекоміра, многошкальностью і збереженням високої точності стеження по дальності (помилка виміру при космічних швидкостях об'єкту порядка 10 м-код ). Імпульсний режим дозволяє реалізувати одночасну роботу декілька РЛС з одним відповідачем. Застосовують і чотирьохпараметричні РЛС з когерентним відповідачем на борту, в яких додатковий вимір радіальної швидкості космічних об'єктів забезпечується при простішому режимі безперервних коливань. Збереження імпульсного режиму і вимір радіальної швидкості по частоті Доплера вимагає вживання в РЛС імпульсного когерентного режиму, при якому замість простого магнетронного передавача застосовується СВЧ підсилювач потужності (наприклад, на клістроні) і складніший імпульсний когерентний відповідач. Станції, що вимірюють 6 параметрів руху об'єкту — дальність, 2 кутових координати і 3 їх похідної (тобто радіальну і 2 кутових швидкості), — застосовують, наприклад, при вимірах цих параметрів, здійснюваних з одного пункту на активній ділянці польоту ракети або КЛА. Складність таких РЛС пов'язана з побудовою багатьох каналів точного фазового виміру кутових координат (точність ~ 10 кутових секунд).
Інший напрям використання РЛС для стеження за ІСЗ(штучний супутник Землі) з висотою польоту в декілька сотень км. і виміри їх траєкторії засновано на вживанні точних пеленгаторів ДМ діапазону із значно простішими (що не стежать) антенами фазових кутомірних каналів, що володіють в цьому діапазоні достатньою ефективною площею, а також економічних і простих бортових передавачів, що працюють в режимі безперервних коливань.
Для стеження за ІСЗ(штучний супутник Землі) на відстанях ~40 тис. км. (стаціонарні ІСЗ(штучний супутник Землі) або ІСЗ(штучний супутник Землі) з еліптичною орбітою типа «Блискавка») застосовують РЛС з тими, що стежать (за програмою польоту — в ДМ діапазоні і автоматично — в СМ діапазоні) повноповоротними параболічними антенами.
Планетна РЛС, вимірююча відстань до планети, параметри її руху і ін. фізичні характеристики, відрізняється великою ефективною поверхнею антени, великою потужністю передавача і високою чутливістю приймального пристрою. Тривалість зондуючого сигналу таких РЛС обмежена часом проходження радіохвиль від Землі до планети і назад, яке рівне, наприклад, для Венери ~5 мін , для Марса ~ 10 мін і для Юпітера ~ 1 ч. Так, в планетній РЛС, за допомогою якої співробітники інституту радіотехніки і електроніки АН(Академія наук) СРСР вивчали Марс, далекомірні виміри проводилися фазовим методом по тій, що огинає коливань з частотою 768 Мгц , що модулюються по амплітуді коливаннями з частотами 3 і 4 гц , що несе, а виміри радіальної складової швидкості — доплеровським методом на частоті, що несе. Сигнал, що приймається, під час сеансів спостереження запам'ятовувався (записувався магнітофоном), а затримка що огинає прийнятого сигналу визначалася (в процесі його багатократного відтворення за межами сеансу зв'язку) кореляційним методом — по максимуму вихідного сигналу корелометра при різних затримках опорного сигналу. Величина доплеровського зсуву частоти визначалася за допомогою селективних електричних фільтрів, налаштованих на певні резонансні частоти.
3агорізонтниє РЛС, використовувані (у США, за даними іноземного друку) в декаметровом (короткохвильовому) діапазоні хвиль для спостереження на відстанях в декілька тисяч км. (наприклад, з метою раннього виявлення пусків балістичних ракет і грубого визначення їх координат, виявлення ядерних вибухів, спостереження за різними областями іоносфери, за польотом ІСЗ(штучний супутник Землі) і т.д.), є наземними стаціонарними установками із складними великими антенами типа багатоелементних антенних грат і потужними передавачами з імпульсною потужністю декілька десятків Мвт. Як правило, такі РЛС двух- або багатопозиційні. Для них характерні багатоканальна побудова (наприклад, з 120 і більш каналами у діапазоні частот 4—6 Мгц ), можливість встановлювати різну тривалість імпульсних сигналів і частоту їх повторення і відповідно регулювати ширину смуги частот в приймачі і ін. характеристики, знаходячи оптимальний режим залежно від стану іоносфери і характеру поставленого завдання.
Літ.: Бартон Д., Системи радіолокацій, пер.(переведення) з англ.(англійський), М., 1967; Леонов А. І., Радіолокація в протиракетній обороні, М., 1967; Станції радіолокацій бічного огляду, під ред. А. П. Реутова, М., 1970; Міщенко Ю. А., Загоризонтна радіолокація, М., 1972.