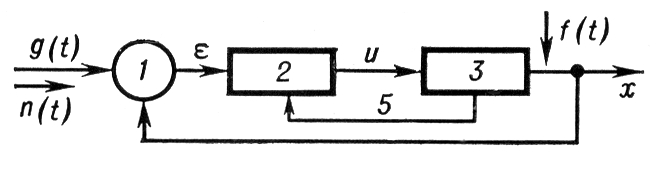
Стежача система, система автоматичного регулювання (управління), відтворююча на виході з певною точністю вхідна задаюча дія, що змінюється по заздалегідь невідомому закону. С. с. може мати будь-яку фізичну природу і різні способи технічного здійснення. Блок-схема ( мал. 1 ) пояснює загальний принцип дії С. с. Один з основних елементів С. с. — порівнюючий пристрій, в якому виробляється порівняння вихідної величини х , що фактично виходить, із заданою вхідною величиною g ( t ) і виробляється сигнал розузгодження e = g ( t ) -х. Передача величини х з виходу на вхід здійснюється по ланцюгу негативною зворотному зв'язку ; при цьому знак х міняється на зворотний. Т. до. за завданням повинно бути х = g ( t ) те розузгодження e є помилкою С. с. Ця помилка в що добре працює С. с. має бути досить малою. Тому сигнал е посилюється і перетвориться в новий сигнал u, який приводить в дію виконавчий пристрій. Виконавчий пристрій змінює х так, щоб ліквідовувати розузгодження. Проте із-за наявності різних обурюючих дій f ( t ) і перешкод n ( t ) розузгодження виникає знов, і С. с. весь час працює на його знищення, тобто «стежить» за ним і, у результаті, за заданою величиною g ( t ) . Для здійснення процесу управління з необхідною точністю застосовують спеціальні пристрої, що коректують, входять до складу підсилювача-перетворювача, і додаткові місцеві зворотні зв'язки. В результаті сигнал і досить складним чином залежить від їй від параметрів стану самого виконавчого пристрою. У деяких випадках С. с. відтворюють вхідну величину g ( t ) в ін. масштабі x ( t ) = kg ( t ) , де до — масштабний коефіцієнт, або відповідно до складнішого функціонального зв'язку x ( t ) = = F [ g ( t )] .
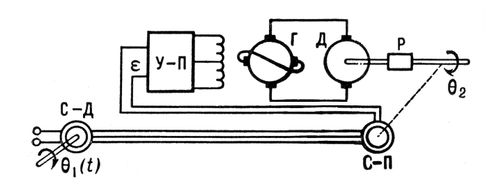
Приклад С. с. — система відробітку на вихідному валу ( мал. 2 ) довільно повороту q 1 ( t ) , що задається на вході кута .
Розузгодження e = q 1 ( t ) — q 2 виробляється сполученими за трансформаторною схемою сельсинами — датчиком і приймачем (останній пов'язаний з вихідним валом). Виконавчим пристроєм є система «генератор-двигун» з редуктором; обурююча дія — зміна навантаження на вихідному валу.
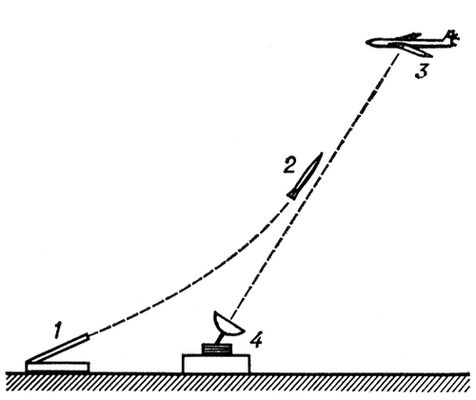
За принципом С. с. працюють системи наведення ( мал. 3 ) . В С. с. антени станції радіолокації розузгодженням служить кутова помилка між променем радіолокації і напрямом на мету; виконавчий пристрій — електропривод антени. Автопілот ракети, що наводиться, також працює за принципом С. с., причому для нього розузгодженням служить відхилення ракети від напряму світивши, а виконавчим пристроєм є рульова машинка і кермо. За принципом С. с. працюють багато систем телекерування і самонаведенія. С. с. є також вимірювальні прилади, що працюють за компенсаційним принципом; у них розузгодженням служить різниця між свідченням приладу і вхідною вимірюваною величиною (див. Компенсатор автоматичний ) . За принципом С. с. працюють деякі обчислювальні пристрої. С. с., вихідний велічиной яких є механічне переміщення, зване стежачим приводом (див., наприклад, Стежачий електропривод ) . Приклади С. с. можна виявити і в живих організмах.
Розрахунок С. с. при її проектуванні в цілому заснований на теорії автоматичного регулювання і управління. С. с. можуть мати безперервне управління (лінійне, нелінійне) або дискретне (релейне, імпульсне, цифрове), що відбивається на виборі методу динамічного розрахунку. Крім того, виробляється технічний розрахунок кожного блоку і елементу. Одна з головних цілей динамічного розрахунку С. с. — синтез пристроїв, що коректують, виходячи із заданих вимог до якості процесу управління.
Літ.: Проектування і розрахунок стежачих систем, Л., 1964; Півників Ст Т., Половко А. М., Пономарев Ст М., Теорія систем телекерування і самонаведенія ракет, М., 1964; Воронів А. А., Основи теорії автоматичного управління, ч. 1—3, М. — Л., 1965—70; Бесекерський Ст А., Попів Е. П., Теорія систем автоматичного регулювання, 3 видавництва, М., 1975.