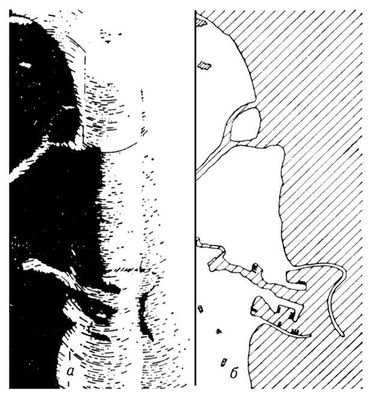
Пасивна радіолокація, радіолокація об'єкту по його власному випромінюванню. Відсутність випромінювання зондуючого сигналу підвищує скритність роботи, істотно утрудняє виявлення пасивних станцій (РЛС) радіолокацій і створення ним перешкод (див. Перешкоди радіолокацій ) . Розрізняють П. р. об'єктів з штучним (радіопередавачі різного призначення) і природним (тепловим) випромінюванням радіохвиль. Прийом пасивною РЛС радіохвиль, що випромінюються земною і водною поверхнями, використовується для зняття карти радіолокації місцевості в навігаційних цілях або огляду місцевості з метою її розвідки, а також для виявлення окремих об'єктів з інтенсивним радіовипромінюванням. Така РЛС має радіоприймач і антену з вузькою, голкоподібною діаграмою спрямованості, скануючої в заданому секторі. Прийняті сигнали після обробки в приймачі поступають на електроннопроменевий індикатор, в якого розгортка зображення синхронізована з переміщенням діаграми спрямованості антени. На екрані індикатора отримують картину теплового радіовипромінювання місцевості ( мал. 1 ). Крім того, пасивні РЛС використовуються для виявлення і визначення координат повітряно-космічних об'єктів, зокрема балістичних ракет на активній ділянці польоту і кутових координат позаземних джерел радіовипромінювання. Останнє служить навігаційним цілям визначення широти і довготи точки розміщення РЛС.
На відміну від так званої активної радіолокації, П. р. не дозволяє знайти дальність лоцируємого об'єкту за даними прийому сигналів лише в одному пункті. Для повного визначення координат об'єкту необхідне спільне використання декілька (³2) РЛС, рознесених на деяке (відоме) відстань. Розрізняють 3 способи визначення координат радіовипромінюючих об'єктів за допомогою П. р.: кутомірний, різницево-далекомірний і угломерно-разностно-дальномерний.
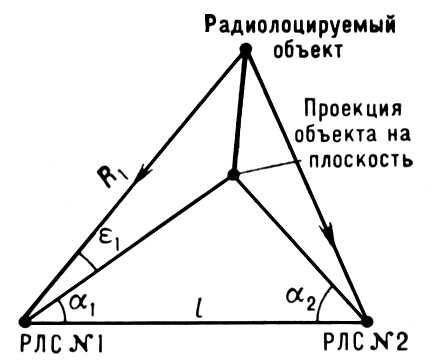
При кутомірному способі визначають лише напрям на лоцируємий об'єкт — за допомогою двох (або більш) пасивних РЛС ( мал. 2 ), рознесених на відстань l . Якщо об'єкт і обидві РЛС розташовані в горизонтальній (вертикальною) плоскості, досить знайти 2 азимута (2 кути місця), а визначення дальності здійснюється вирішенням трикутника. Для визначення координат об'єкту в загальному випадку необхідно виміряти не менше 3 кутових координат. Вимірявши 2 азимути і один кут місця, дальність до об'єкту від першої РЛС можна знайти по формулі:
різницево-далекомірний спосіб визначення координат передбачає вимір різниць відстаней від випромінюваного об'єкту до пасивних РЛС. Для визначення координат об'єкту на плоскості потрібно визначити не менше двох значень різниці відстаней, для чого необхідно мати принаймні 3 рознесені РЛС. Так само, як і в різницево-далекомірних радіонавігаційних системах, місце розташування об'єкту визначається точкою пересічення гіпербол, відповідних виміряним різницям відстаней, з фокусами в крапках розташування РЛС.
Угломерно-разностно-дальномерний спосіб є комбінацією перших два і полягає у визначенні напрямів і різниці відстаней від об'єкту до РЛС. При цьому способі треба мати не менше два РЛС. Визначення площинних координат об'єкту забезпечується виміром однієї кутової координати і різниці відстаней.
Дальність дії пасивних РЛС при різко контрастних об'єктах може перевершувати дальність дії активних (випромінюючих) РЛС. Точність виміру кутових координат пасивними і активними РЛС приблизно однакові, точність визначення дальності в пасивних РЛС, як правило, нижче.
Літ.: Малишкин Е. А., Пасивна: радіолокація, М., 1961; Миколаїв А. Р., Перцов С. Ст, Радіотеплолокация, М., 1964.