Шарнірний механізм, механізм, ланки якого утворюють лише обертальні кінематичні пари (шарніри ). По видах руху ланок Ш. м. підрозділяються на плоскі, сферичні і просторові загального вигляду. У плоских Ш. м. осі шарнірів паралельні, і тому всі ланки здійснюють плоскопаралельний рух. Простий плоский Ш. м. складається з 4 ланок і називається шарнірним четирехзвенником . В сферичній Ш. м. осі шарнірів перетинаються в одній крапці. Найменше число ланок сферичного Ш. м. також дорівнює 4. Сферичний четирехзвенник ( мал. 1 ) застосовується, наприклад, в багатопоршневих насосах і в пристроях стабілізації літальних апаратів. Окремий випадок сферичного четирехзвенника, в якому осі двох обертальних пар взаємно перпендикулярні, — карданний механізм . В просторовому Ш. м. осі обертальних пар схрещуються під різними кутами. У загальному випадку просторів. Ш. м. повинен мати не менше 7 ланок (просторовий семізвенник). Проте при виконанні певних співвідношень між лінійними і кутовими розмірами ланок мінімальне число ланок зменшується до 4 (наприклад, механізм Беннета). Просторів. Ш. м. застосовуються в з.-х.(сільськогосподарський) машинах, машинах-автоматах (наприклад, в легкій і харчовій промисловості) і т.д.
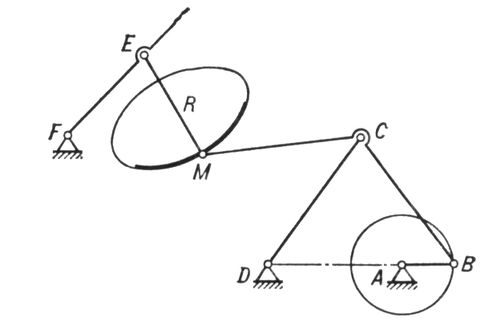
За способом завдання необхідного руху робочої ланки Ш. м. підрозділяються на тих, що переміщають, направляють, передавальні і механізми для руху із зупинками. Переміщаючі Ш. м. призначені для переміщення робочої ланки з одного положення в інше. Число заданих положень зазвичай дорівнює 2, рідше 3 або 4. Переміщаючі Ш. м. застосовуються в металургійних машинах (кантувальники, перекидачі, механізми для закриття льоток), в машинах-автоматах харчової промисловості для переміщення робочих органів і ін. Направляючі Ш. м. призначені для переміщення по заданій кривій однієї точки ланки, не створюючої кінематичних пар із стійкою. Найбільше поширення мають Ш. м., що направляють по дузі кола (круги направляючі механізми), і прямолінійно-направляючі механізми (наприклад, Чебишева паралелограм ). Застосовуються також Ш. м. для креслення і обгинання парабол і гіпербол (наприклад, Ш. м. для шліфування дзеркал астрономічних приладів). Передавальні Ш. м. призначені для перетворення обертальних рухів по певному закону. Інколи їх називають механізмами для відтворення заданої функції. У рахунково-вирішальних пристроях передавальні Ш. м. служать для виконання математичних операцій: складання, множення, піднесення до ступеня і т.п. Шляхом спеціального підбору довжин ланок в Ш. м. можна отримати наближене відтворення всіляких функцій. Наприклад, при відтворенні функції в = f ( x ) кути повороту однієї ланки, що обертається пропорційні аргументу х , а кути повороту іншого — пропорційні функції в. Ш. м. для руху із зупинками застосовуються в машинах-автоматах для приведення в рух робочого органу, який, виконавши певну операцію, повинен залишатися нерухомим протягом того часу, коли рухаються ін. робочі органи. На мал.(малюнок) 2 показана схема шестізвенного Ш. м. для руху із зупинками, що перетворює безперервний рух ланки AB в рух ланки EF з тривалими зупинками в одному положенні. У основі цього Ш. м. лежить круговий направляючий механізм ABCD , в якому довжини ланок підібрані так, що траєкторія точки М-коду на ділянці, відміченій на схемі жирною лінією, майже збігається з дугою кола радіусу R. При русі крапки М-кодом по цій ділянці ланка EF залишається нерухомим, якщо довжина ланки EM дорівнює радіусу R і точка Е збігається в цей час з центром вказаного кола. При русі крапки М-кодом по ін. ділянці траєкторії ланка EF переміщається на деякий кут і повертається в положення зупинки.
Широке поширення Ш. м. в різних областях техніки пояснюється простотою їх виготовлення і великою надійністю. До недоліків Ш. м. відносяться порівняно великі їх габарити і можливість появи значних зусиль що діють на ланки в тих положеннях, коли переміщення якого-небудь центру шарніра складає з силою, що діє, кут, близький до 90°. Крім того, не всі необхідні закони перетворення руху можуть бути отримані за допомогою Ш. м.