Механізм (від греч.(грецький) mechane — машина), система тіл, призначена для перетворення руху одного або декількох тіл в необхідні рухи ін. тіл. М. складають основу більшості машин, застосовуються в багатьох приладах, апаратах і технічних пристроях. Тверде тіло, що входить до складу М., зване ланкою, може складатися з однієї або декількох непорушно сполучених деталей (окремо виготовлених частин). З'єднання двох дотичних ланок, що допускає їх відносний рух, називається кінематичною парою (див. також Кінематика механізмів ). Найбільш поширені кінематичної пари: обертальна (шарнір), поступальна (повзун і напрямна), гвинтова (гвинт і гайка), сферична (кульовий шарнір). Якщо в перетворенні руху, окрім твердих тіл (ланок), беруть участь рідкі або газоподібні тіла, то М. називають відповідно гідравлічним або пневматичним.
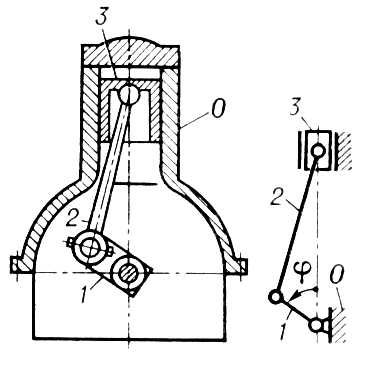
Для вивчення руху ланок М. складається кінематична схема, на якій вказуються дані, необхідні для визначення положення ланок. На мал. 1 показано креслення М. двигуна внутрішнього згорання і його кінематична схема. На кінематичній схемі кривошип і шатун умовно представлені у вигляді відрізань, що сполучають центри шарнірів, повзун — у вигляді прямокутника, стійка Про — у вигляді відрізання з штрихуванням, що змальовує що направляє повзуна, і трикутника з шарніром, що має нерухому вісь обертання. Для визначення за кінематичною схемою положення всіх рухливих ланок М. досить знати положення однієї ланки. Ланку, положення якої для будь-якого моменту часу задане, називають початковим. При дослідженні М. число початкових ланок повинне збігатися з числом його мір свободи, тобто з числом незалежних змінних, що визначають положення всіх ланок. М. двигуна внутрішнього згорання має одну міру свободи; як незалежна змінна для М. можна прийняти кут j. У шарнірному М. з двома мірами свободи, ( мал. 2 ) незалежними змінними можуть бути кути j 1 і j 2 , або j 1 і j 3 , або, нарешті, j 2 і j 3 .
М. застосовується в тих випадках, коли не можна отримати безпосередньо необхідний рух тіл і виникає необхідність в перетворенні руху. Наприклад, ротор електродвигуна і підшипники, в яких він обертається, не утворюють М., оскільки в цьому випадку електроенергія безпосередньо перетвориться в необхідний рух без якого-небудь проміжного перетворення механічного руху. М. з'являється лише тоді, коли потрібно зменшити кутову швидкість вихідного валу, тобто встановлюється знижуюча зубчаста передача. М. двигуна внутрішнього згорання перетворить прямолінійний рух поршня в обертальному рух колінчастого валу. М., призначений для перетворення обертальних або прямолінійних рухів в обертальних (і навпаки), називається передавальним М., або передачею . Залежно від вигляду ланок розрізняють зубчасті, важелі, фрикційні, ланцюгові, ремінні передачі. До цього ж типа М. відносяться гидро- і пневмопередачи. М., службовець для відтворення руху деякої крапки по заданій траєкторії, називається таким, що направляє. Найбільше поширення мають М., відтворюючі рух по прямій лінії (що прямолінійний-направляють) і по дузі кола (що кругові направляють). М. призначені для складного переміщення твердого тіла в просторі або в плоскості, називаються такими, що переміщають.
В 60 — початку 70-х рр. 20 ст з'явилися нові М., створені для виконання завдань, пов'язаних з космічною технікою (М. для передачі обертання у вакуумі, М. просторової орієнтації), медичної техніки (регульовані апарати, біопротези), для роботи в середовищах, недоступних або небезпечних для людини (підводні глибини, космос, атомні реактори). Для виконання цих робіт знайшли вживання маніпулятори, основу яких складають просторові М. з багатьма мірами свободи. Розвиток маніпуляторів привів до створення промислових роботів, що дозволяють автоматизувати процеси обробки, монтажу і збірки виробів. Див. також Машин і механізмів теорія .
Літ.: Шкіряників С. Н., Есипенко Я. І., Раськин Я. М., Механізми, 3 видавництва, М., 1965; Артобольовський І. І., Механізми в сучасній техніці, т, 1—2, М., 1970—71.