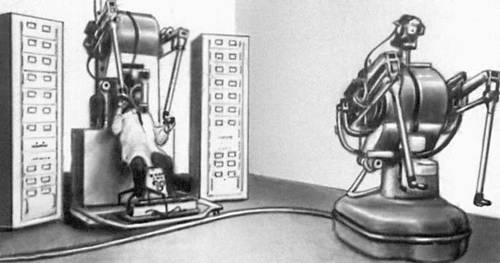
Робот (чеш. robot, від robota — підневільна праця, rob — раб), машина з антропоморфною (людиноподібним) поведінкою, яка частково або повністю виконує функції людини (інколи тваринного) при взаємодії з навколишнім світом. Термін «робот» був вперше введений До. Чапеком в п'єсі «R. U. R.» (1920), де Р. називали механічних людей. З розвитком робототехникі визначилися 3 різновиди Р.: з жорсткою програмою дій; керовані людиною-оператором; з штучним інтелектом (інколи звані інтегральними), що діють цілеспрямовано («розумно») без втручання людини. Більшість сучасних Р. (всіх трьох різновидів) — Р.-манипуляторы (див. Маніпулятор ), хоча існують і інші види Р. (наприклад, інформаційні, крокуючі і т. п.). Можливе об'єднання Р. першого і другого різновидів в одній машині з розділенням часу їх функціонування. Допустима також спільна робота людини з Р. третього вигляду (у так званому супервізорному режимі). Перші Р. (андроїди, що імітували рухи і зовнішній вигляд людини) використовувалися переважно в розважальних цілях (див. Автомат ) . З 30-х рр. у зв'язку з автоматизацією виробництва Р.-автоматы стали застосовувати в промисловості поряд з традиційними засобами автоматизації технологічних процесів, зокрема в дрібносерійному виробництві і особливо в цехах з шкідливими умовами праці ( мал. 1 ).
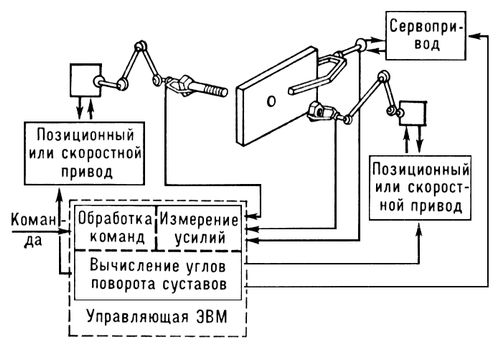
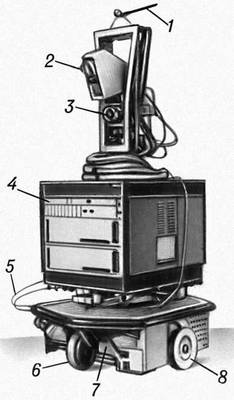
Промисловий Р.-манипулятор має «механічну руку» (одну або декілька) і винесений пульт управління або вбудований пристрій програмного управління, рідше ЕОМ(електронна обчислювальна машина). Він може, наприклад, переміщати деталі масою до декількох десятків кг в радіусі дії його «механічних рук» (до 2 м-код ) , виконуючи від 200 до 1000 переміщень в годині Промислові Р.-автоматы мають перевагу перед людиною в швидкості і точність виконання ручних одноманітних операцій. Найбільш поширені Р.-манипуляторы з дистанційним управлінням і «механічною рукою», закріпленою на рухливій або нерухомій підставі. Оператор управляє рухом «руки», одночасно спостерігаючи її безпосередньо або на телевізійному екрані; у останньому випадку. Р. забезпечується «телевізійним оком» — передавальною телевізійною камерою ( мал. 2а ). Часто Р. оснащують автоматичною системою управління, що виучується . Якщо такому Р. «показують» послідовність операцій, то система управління фіксує се у вигляді програми управління і потім точно відтворює при роботі. Р.-манипуляторы використовують для роботи в умовах відносної недоступності ( мал. 2б ) або в небезпечних, шкідливих для людини умовах, наприклад в атомній промисловості, де вони застосовуються з 50-х рр. У 60-х рр. з'явилися підводні Р.-манипуляторы всіляких конструкцій і призначення: від глибоководних керованих апаратів з «механічними руками» (зокрема, для захвату зразків породи з дна морить і т. д.) і платформ з дослідницькою апаратурою до підводних бульдозерів і бурових установок, що повзають по морському дну.
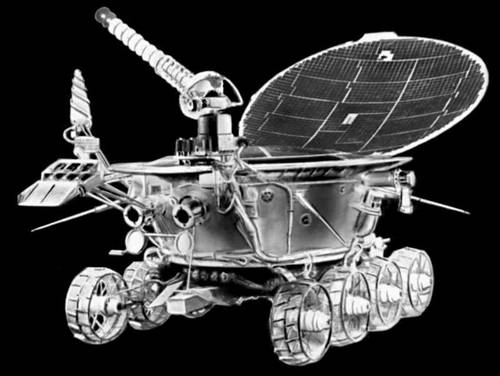
В кінці 60-х рр. в робототехнике виник новий науковий напрям, пов'язаний із створенням інтелектуальних Р. Такие Р. ( мал. 3 ) мають датчики очувствленія (сенсорну систему), що сприймають інформацію про навколишнє оточення, пристрій обробки отриманої інформації (штучний інтелект) — спеціалізовану ЕОМ(електронна обчислювальна машина) з набором програм — і виконавчі механізми (моторну систему). Дії інтелектуального Р. володіють деякими ознаками людської поведінки: датчики збирають інформацію про предмети навколишнього світу, їх властивостях і взаємодії; на основі цих даних штучний інтелект формує модель зовнішнього оточення і приймає рішення про послідовність дій Р., які реалізуються виконавчими механізмами. До 1975 інтелектуальних Р. знаходилися у стадії наукових розробок і спроб використання їх в промисловості.
Літ.: Людські здібності машин, пер.(переведення) з англ.(англійський), М., 1971; Кобрінський А. Е., Ось вони — роботи, М. 1972; Теорія і пристрій маніпуляторів. Сб. ст., М., 1973; Інтегральні роботи, пер.(переведення) з англ.(англійський), М., 1973; Попів Е. П., роботи-маніпулятори, М., 1974.