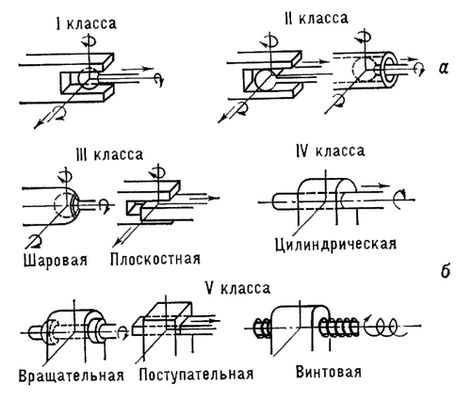
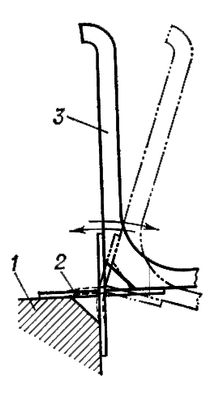
Кінематична пара, рухливе сполучення двох твердих ланок, що накладає обмеження на їх відносний рух умовами зв'язку. Кожна з умов зв'язку усуває одну міра свободи, тобто можливість одного з 6 незалежних відносних рухів в просторі. У прямокутній системі координат можливо 3 поступальних рухи (у напрямі 3 осей координат) і 3 обертальних (довкола цих осей). По числу умов зв'язку S До. п. діляться на 5 класів. Число мір свободи До. п. W=6 — S . Усередині кожного класу До. п. діляться на види по можливих відносних рухах ланок, що залишилися. По характеру зіткнення ланок виділяють нижчі До. п. — з контактом по поверхнях, і вищі — з контактом по лініях або в крапках. Вищі До. п. можливі всіх 5 класів і багатьох видів; нижчі — лише 3 класів і 6 видів ( ріс.1 ). Розрізняють також геометрично замкнуті і незамкнуті До. п. По-перше постійне зіткнення поверхонь забезпечується формою їх елементів (наприклад, все До. п. на мал. 1 ), в других — для замикання потрібна притискуюча сила, т.з. силове замикання (наприклад, в кулачковому механізмі). Умовно до До. п. відносять деякі рухливі сполучення з декількома проміжними тілами кочення (наприклад, шаріко- і роликопідшипники) і з проміжними елементами, що деформуються (наприклад, так звані безлюфтовиє шарніри приладів з плоскими пружинами; мал. 2 ).