Шарнирный механизм,механизм,звенья которого образуют только вращательные кинематические пары (шарниры). По видам движения звеньев Ш. м. подразделяются на плоские, сферические и пространственные общего вида. В плоских Ш. м. оси шарниров параллельны, и поэтому все звенья совершают плоскопараллельное движение. Простейший плоский Ш. м. состоит из 4 звеньев и называется шарнирным четырёхзвенником. В сферической Ш. м. оси шарниров пересекаются в одной точке. Наименьшее число звеньев сферического Ш. м. также равно 4. Сферический четырёхзвенник (рис. 1) применяется, например, в многопоршневых насосах и в устройствах стабилизации летательных аппаратов. Частный случай сферического четырёхзвенника, в котором оси двух вращательных пар взаимно перпендикулярны, — карданный механизм. В пространственном Ш. м. оси вращательных пар скрещиваются под различными углами. В общем случае пространств. Ш. м. должен иметь не менее 7 звеньев (пространственный семизвенник). Однако при выполнении определённых соотношений между линейными и угловыми размерами звеньев минимальное число звеньев уменьшается до 4 (например, механизм Беннета). Пространств. Ш. м. применяются в с.-х.(сельскохозяйственный) машинах, машинах-автоматах (например, в лёгкой и пищевой промышленности) и т.д.
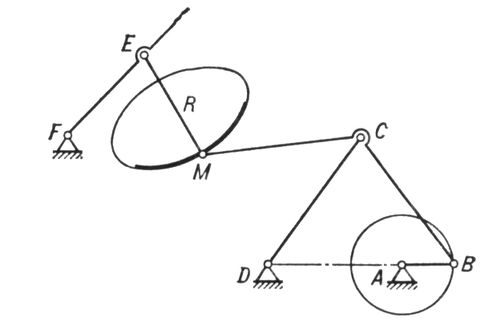
По способу задания требуемого движения рабочего звена Ш. м. подразделяются на перемещающие, направляющие, передаточные и механизмы для движения с остановками. Перемещающие Ш. м. предназначены для перемещения рабочего звена из одного положения в другое. Число заданных положений обычно равно 2, реже 3 или 4. Перемещающие Ш. м. применяются в металлургических машинах (кантователи, опрокидыватели, механизмы для закрытия лёток), в машинах-автоматах пищевой промышленности для перемещения рабочих органов и др. Направляющие Ш. м. предназначены для перемещения по заданной кривой одной точки звена, не образующего кинематических пар со стойкой. Наибольшее распространение имеют Ш. м., направляющие по дуге окружности (круговые направляющие механизмы), и прямолинейно-направляющие механизмы (например, Чебышева параллелограмм). Применяются также Ш. м. для черчения и огибания парабол и гипербол (например, Ш. м. для шлифования зеркал астрономических приборов). Передаточные Ш. м. предназначены для преобразования вращательных движений по определённому закону. Иногда их называют механизмами для воспроизведения заданной функции. В счётно-решающих устройствах передаточные Ш. м. служат для выполнения математических операций: сложения, умножения, возведения в степень и т.п. Путём специального подбора длин звеньев в Ш. м. можно получить приближённое воспроизведение разнообразных функций. Например, при воспроизведении функции у = f (x) углы поворота одного вращающегося звена пропорциональны аргументу х, а углы поворота другого — пропорциональны функции у. Ш. м. для движения с остановками применяются в машинах-автоматах для приведения в движение рабочего органа, который, выполнив определённую операцию, должен оставаться неподвижным в течение того времени, когда движутся др. рабочие органы. На рис.(рисунок) 2 показана схема шестизвенного Ш. м. для движения с остановками, преобразующего непрерывное движение звена AB в движение звена EF с длительными остановками в одном положении. В основе этого Ш. м. лежит круговой направляющий механизм ABCD,в котором длины звеньев подобраны так, что траектория точки М на участке, отмеченном на схеме жирной линией, почти совпадает с дугой окружности радиуса R. При движении точки М по этому участку звено EF остаётся неподвижным, если длина звена EM равна радиусу R и точка Е совпадает в это время с центром указанной окружности. При движении точки М по др. участку траектории звено EF перемещается на некоторый угол и возвращается в положение остановки.
Широкое распространение Ш. м. в различных областях техники объясняется простотой их изготовления и большой надёжностью. К недостаткам Ш. м. относятся сравнительно большие их габариты и возможность появления значительных усилий, действующих на звенья в тех положениях, когда перемещение какого-либо центра шарнира составляет с действующей силой угол, близкий к 90°. Кроме того, не все требуемые законы преобразования движения могут быть получены с помощью Ш. м.