Управління система із змінною структурою (СПС), нелінійна система автоматичного управління, що складається з сукупності безперервних підсистем (званих структурами) з певним правилом переходу в процесі функціонування від однієї структури даної сукупності до іншої. У СП(Збори постанов) З пристрій управління містить ключові елементи, які розривають або відновлюють зв'язки між функціональними елементами системи змінюючи тим самим канали передачі дій і забезпечуючи перехід від однієї структури системи до іншої ( мал. 1 ). Такий принцип побудови пристрою управління істотно розширює можливості управління унаслідок використання корисних властивостей кожній із структур і, крім того, дозволяє набути нових властивостей, не властивих жодній з них.
Особливості СП(Збори постанов) З можна пояснити на прикладі простої системи автоматичного управління (САУ), поведінка (рух) якої описується диференціальним рівнянням
, (1)
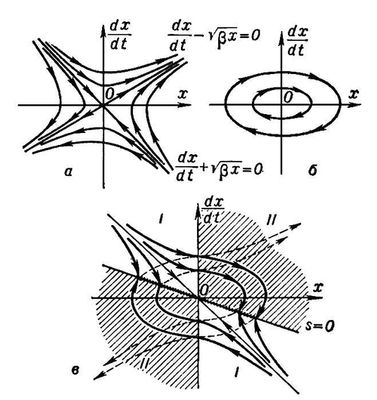
де х – керована величина, u – дія, що управляє, t – час. Хай в САУ (1) можлива реалізація лише позитивною ( u = b x , b = const > 0) і негативною ( u = – a х, а = const > 0) зворотному зв'язку (a і b – коефіцієнт передачі ланцюга зворотного зв'язку). При позитивному зворотному зв'язку рух САУ описується рівнянням : (структура I), а при негативній (структура II). Для наочного представлення поведінки (рухи) САУ будують її фазові портрети (див. Фазовій плоскості метод ) для структури I ( мал. 2 , а) і структури II ( мал. 2 , би).
Завдання полягає в тому, що потрібно вибрати таке управління і з класу можливих управлінь, при якому система володіє асимптотичною стійкістю. З аналізу фазових портретів системи виходить, що ні позитивний, ні негативний зворотний зв'язок порізно не вирішує поставленого завдання. Тому відповідно до методів СП(Збори постанов) З реалізують наступне правило зміни структур:
(2)
, з = const, 0 < з < .
Фазовий портрет такої системи змальований на мал. 2 , би; з аналізу портрета виходить, що крапка, що змальовує, з довільного початкового положення потрапляє на пряму s = 0, що проходить через початок координат, в околиці якої фазові траєкторії направлені назустріч один одному і, отже, крапка, що змальовує, не може покинути цю пряму. Траєкторія s = 0 не належить жодній із структур (I або II), тому, згідно (2), за рахунок перемикання управління і в системі відбувається зміна структур теоретично з безконечною частотою. Такий режим руху називається таким, що ковзає, а за рівняння руху береться рівняння прямої s = 0:
, з > 0. (3)
Всі вирішення рівняння (3) прагнуть до нуля при t ® ¥, тобто поставлене завдання вирішене. Істотно, що рух системи в ковзаючому режимі не залежить від характеристик об'єкту управління і коефіцієнт зворотного зв'язку, якість перехідного процесу визначається лише вибором параметра с.
Розглянутий приклад показує, що за допомогою поєднання неприйнятних порізно структур і за рахунок використання ковзаючих режимів можна синтезувати СП(Збори постанов) З, що володіють рядом позитивних властивостей, зокрема аперіодичною стійкістю і параметричною інваріантністю . За допомогою СП(Збори постанов) З вирішується широкий круг завдань теорії управління, наприклад завдання високоякісного відтворення задаючої дії при інваріантності до параметричних і зовнішніх обурень, багатозв'язкового регулювання, оптимізації і ін.
Літ.: Емельянов С. Ст, Системи автоматичного управління із змінною структурою, М., 1967; Системи із змінною структурою і їх вживання в завданнях автоматизації польоту, М., 1968; Теорія систем із змінною структурою, М., 1970; Уткин Ст І., Ковзаючі режими і їх вживання в системах із змінною структурою, М., 1974.