Конвеєр (англ. conveyer, від convey — перевозити), транспортер, машина безперервної дії для переміщення сипких, кускових або штучних вантажів.
Історична довідка. За декілька тисячоліть до н.е.(наша ера) в Древньому Китаї, Індії для безперервної подачі води з водоймищ в зрошувальні системи використовували ланцюгові насоси, які можна вважати прототипами скребкових К.; в Месопотамії і Давньому Єгипті застосовували багатоковшові і гвинтові водопідйомники — попередники сучасних ковшових елеваторів і гвинтових К. Первиє спроби вживання скребкових і гвинтових До. для переміщення насипних матеріалів (наприклад, в борошномельному виробництві) відносяться до 16—17 вв.(століття) В кінці 18 ст До. стали систематично використовувати для транспортування легких сипких матеріалів на невеликі відстані. У 30-і рр. 19 ст з тією ж метою вперше було застосовано До. із стрічками з міцної тканини. У 2-ій половині 19 ст почалося промислове використання До. для доставки важких масових і штучних вантажів. Розширення сфер застосування До. зумовило появу і експлуатаційне освоєння нових типів К.: стрічкових з тканинними прогумованими стрічками (1868, Великобританія), стаціонарних і пересувних пластинчастих (1870, Росія), гвинтових із спіральними гвинтами для крупнокускових матеріалів (1887, США), ковшових з шарнірно закріпленими ковшами для доставки вантажів по складним трасам (1896, США), стрічкових із сталевими стрічками (1905, Швеція), інерційних (1906, Великобританія, Німеччина) і т.д. У 1882 До. був використаний для зв'язку технологічних агрегатів в потоково-масовому виробництві (США). Декілька пізніше стали застосовуватися підлогові літейниє (1890, США), підвісні (1894, Великобританія) і спеціальні складальні До. (1912—14, США).
З 80-х рр. 19 ст виготовлення До. у промислово розвинених країнах поступово виділялося в окрему область машинобудування. У сучасних типах До. збереглися основні конструктивні елементи, які удосконалювалися відповідно до досягнень науки і техніки (заміна ремінного приводу електричним, використання вібраційної техніки, вживання енергії стислого повітря і т.д.).
Класифікація конвеєрів. Основна класифікаційна ознака До. — тип тягового і грузонесущего органу. Розрізняють До. із стрічковим, ланцюговим, канатним тяговими органами і К. без тягового органу (гравітаційні, інерційні, гвинтові). До. з тяговим органом можуть бути по вигляду грузонесущего органу стрічковими, пластинчастими, люлечнимі, скребковими, ковшовими і пр. Для таких До. характерний загальний з робочим органом рух вантажу на робочих ділянках. Тягове зусилля передається або грузонесущим елементом, або елементом, що проштовхує або тягне грузнув по нерухомому жолобу, трубі, настилу і т.п. Для До. без тягового органу характерний роздільний рух вантажу і робочих органів, що здійснюють круговий обертальний (роликові, гвинтові До.) або зворотно-поступальний робочий рух (наприклад, інерційні До.). До. можуть мати машинний привід (найчастіше електричний, рідше пневматичний) або вантаж може переміщатися під дією сили тяжіння (гравітаційні До.).
Залежно від умов використовують До. підлогові і підвісні. Підлогові До. можуть бути стаціонарними, пересувними або переносними. На До. можна переміщати вантаж в горизонтальній або близькій до неї похилій плоскості (стрічкові, пластинчасті, тележечниє, скребкові, роликові, гвинтові, вібраційні, такі, що коливаються); у вертикальній або близькій до неї похилій плоскості (скребкові, ковшові, гвинтові, вібраційні До.); у будь-якій плоскості. У останньому випадку До. складаються з горизонтальних, вертикальних або похилих ділянок, що чергуються (підвісні, ковшові, скребкові, люлечниє і ін.). Крім того, До. можуть розрізнятися залежно від роду переміщуваних вантажів — насипних або штучних. Конструкція деяких До. дозволяє транспортувати як насипні, так і штучні вантажі. Особливі групи До. складають елеватори, вертикальні До. з підвісними ковшами, люльками або полицями, ескалатори спеціальні пластинчасті і стрічкові До. для переміщення людей, крокуючі конвеєри, тріммери, стакери для штабелювання колод, а також комбіновані (наприклад, роліколенточниє До. типа «Рапістан», що забезпечують утримання штучних вантажів на спусках із заданими інтервалами) і т.д.
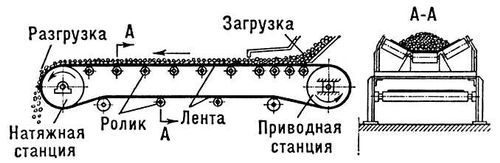
Основні типи конвеєрів. Стрічкові До. використовують для переміщення сипких кускових і штучних вантажів на відстані, що досягають інколи 10—12 км. і більше. Такі До. зазвичай складають з окремих секцій. Траса До. у горизонтальній плоскості прямолінійна, а у вертикальній може бути похилою або мати складнішу конфігурацію. Тяговий і грузонесущий орган — стрічка (див. Стрічка конвеєрна ) , яка рухається по стаціонарних ролікоопорам, огинаючи приводний натяжний, а інколи і барабани, що відхиляють. Вантаж переміщається на стрічці разом з нею. Залежно від типа ролікоопор стрічка має плоску або жолобчасту форму. До. з плоскою стрічкою використовується переважно для переміщення штучних вантажів. Необхідне натягнення стрічки забезпечує натяжна станція, зазвичай вантажна, а в пересувних До. — гвинтова. Привід До. (пріводная станція) складається з електродвигуна, редуктора, барабана і сполучних муфт. Завантаження сипкого вантажу на стрічку виробляють через направляючий лоток або воронку, а розвантаження — через кінцевий барабан або за допомогою плужкового або барабанного зкидача. Стрічкові До. мають високу експлуатаційну надійність, забезпечують продуктивність від декількох т/ч до декількох тисяч т/ч. Ширіна тканинних стрічок в До. від 300 до 2000 мм, швидкість руху стрічок складає 1,5—4,0 м/сек. Короткі пересувні стрічкові До. вмонтовуються на колісному ходу і використовуються на навантажувально-розвантажувальних роботах і в будівництві.
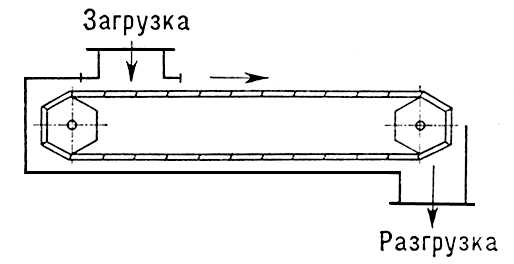
Пластинчасті До. призначені для переміщення в горизонтальній плоскості або з невеликим нахилом (до 35°) важких (500 кг і більш) штучних вантажів, крупнокускових, у тому числі острокромчатих матеріалів, а також вантажів, нагрітих до високої температури. Пластинчасті До., стаціонарні або пересувні, мають ті ж основні вузли, що і стрічкові. Грузонесущий орган — металевий, рідше дерев'яний, пластмасовий настил-полотно, такий, що складається з окремих пластин, прикріплених до 1 або 2 тяговим ланцюгам (втулково-роликовим). Настил може бути плоским, хвилястим або коробчатого перетину, без бортів або з бортами. Тягові ланцюги огинають пріводниє і натяжні зірочки, встановлені на кінцях рами. Розрізняють пластинчасті До. загального призначення (основний тип) і спеціальні. До останніх відносяться До. з просторовою трасою, розливні машини для металу, пасажирські ескалатори і ін. Швидкість руху вантажу невелика — 0,3— 1,0 м/сек. Для збільшення продуктивності До. з плоским настилом доповнюють нерухомими бортами. Типові пластинчасті До. мають продуктивність до 2000 т/ч.
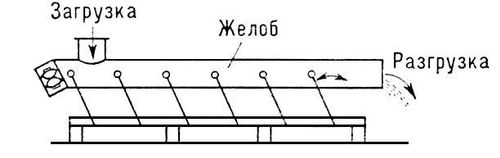
Скребкові До. переміщають вантаж рухомими по жолобу або трубі шкрябаннями. Такі До. використовують для переробки сипких або кускових вантажів, що поступають в жолоб через завантажувальну воронку. Робочою гілкою зазвичай є ніжняя, рідше — верхня, інколи обидві гілки. Контур перетину жолоба і конфігурація скребків мають бути однаковими — прямокутної, напівкруглої, трапецеїдальної форми. Шкрябання бувають штампованими з листової сталі або литими, а жолоби виготовляють металевими, рідше дерев'яними. Скребкові До. в порівнянні з пластинчастими мають меншу масу, можуть завантажуватися і розвантажуватися в будь-якій крапці по всій довжині жолоба. Вживання скребкових До. обмежено із-за подрібнення вантажів і швидкого зносу жолоба, особливо при переміщенні абразивних матеріалів. Крім того, для скребкових До. характерна велика витрата енергії, що витрачається на подолання шкідливих опорів. Швидкість робочого органу скребкових До. 0,16—0,5 і рідше — 1,0 м/сек, продуктивність 50—350 т/ч. Скребкові До. зазвичай застосовуються для переміщення вантажу на відстані до 100 м.
Різновидом скребкових До. є До. із зануреними шкрябаннями, в яких шкрябання перекривають лише частину перетину жолоба, а вантаж заповнює всю робочу гілку жолоба або велику її частину. Такі До. можуть мати складну трасу і використовуються для переміщення вантажів (зазвичай мелкосипучих) в горизонтальному, вертикальному і похилому напрямах із швидкістю 0,1— 0,25 м/сек. Особливу групу скребкових До. складають трубчасті До., тяговий ланцюг і шкрябання яких розміщені усередині труби, причому шкрябання заповнюють весь її перетин. Такі До. також можуть мати просторову трасу.
До. з ланцюгами, що несуть і провідними, на відміну від інших типів До., не мають грузонесущего органу і застосовуються головним чином в потокових лініях при конвеєрній збірці . На До. з ланцюгами, що несуть, вантажі встановлюються безпосередньо на тягові ланцюги, що ковзають в нерухомих що направляють. На До. з провідними ланцюгами вантажі пересуваються по нерухомих опорних дорогах, безпосередньо по підлозі цеху або мають власний колісний або гусеничний хід. У масовому і серійному виробництві на складальних роботах застосовують так звані тележечниє конвеєри. Вони є візками, сполученими тяговим ланцюгом і рухомі по замкнутій трасі. На візках виконують основні процеси ливарного виробництва (формування, заливку, охолоджування) або збірку машин і вузлів.
Підвісні До. з ланцюговим тяговим органом служать для безперервного (рідше періодичного) переміщення штучних вантажів. Траса таких До. зазвичай просторова замкнута, має складний контур. Підвісні До. ділять на 3 групи: грузонесущие (каретки для вантажу постійно сполучені з тяговим органом); що тягнуть (каретки також постійно сполучені з тяговим органом і мають крюки для приєднання візків, що переміщаються по підлозі цеху або складу); що штовхають (каретки не пов'язані постійно з тяговим органом і пересуваються по підвісних дорогах). Вживання підвісних До. дозволяє вирішити проблеми комплексної механізації і автоматизації навантажувально-розвантажувальних і складських робіт на стику внутрішньоцехового, внутрізаводського і магістрального транспорту. Значна роль їм відводиться і в створенні повністю автоматизованих складів.
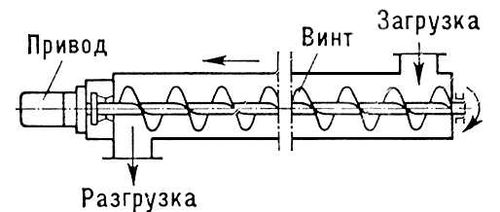
Гвинтові До. служать для переміщення пилоподібних і мелкокуськових вантажів в горизонтальній або похилій (до 20°) плоскості, рідше у вертикальній плоскості (До. з гвинтами, що швидко обертаються). До. має металевий закритий жолоб, усередині якого обертається вал з лопатями, розташованими по гвинтовій лінії. Лопаті можуть бути суцільними (для легкосипких вантажів), стрічковими (для вологих і кускових вантажів) і у вигляді окремий укріплених на валу лопаток (для липких вантажів, що злежуються). При обертанні гвинта лопаті проштовхують вантаж уздовж жолоба. Гвинтові До. складаються з секцій довжиною 2—4 м-коду, загальна довжина До. не перевищує зазвичай 60 м-коду, діаметр жолоба 100—600 мм. Гвинтові До. прості по конструкції, зручні в експлуатації, особливо при транспортуванні вантажів, що порошать. Проте лопаті і жолоб До. порівняно швидко зношуються, вантаж подрібнюється і стирається, крім того, потрібна підвищена витрата енергії.
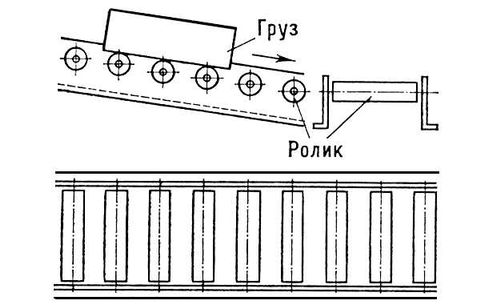
Роликові До. служать для переміщення штучних вантажів з плоскою ребристою або циліндровою поверхнею. На нерухомих осях рами До. у підшипниках обертаються ролики. Довжина ролика має бути дещо більше ширини або діаметр вантажу, а відстань між роликами декілька менше половини довжини вантажу. Дрібні вантажі із складною конфігурацією переміщають на такому До. у ящиках плі на піддонах. Роликові До. бувають 2 типів: гравітаційні і пріводниє. У гравітаційних До., встановлюваних з ухилом в 2—5°, ролики вільно обертаються під дією сили тяжіння переміщуваного вантажу. У пріводних До. ролики мають груповий привід від двигуна. Такі До. застосовують, коли потрібно забезпечити постійну швидкість руху вантажів, переміщати їх в строго горизонтальній плоскості або піднімати під деяким кутом. Роликовий До. складається з секцій, кожна довжиною 2—3 м. Залежно від конфігурації траса може включати криволінійні і відкидні секції, поворотні круги і стрілочні переведення і т.д.
Інерційні До. служать для транспортування сипких, рідше дрібних штучних вантажів на порівняно короткі відстані в горизонтальному або похилому (до 20°) напрямах. У інерційних До. частки вантажу ковзають по грузонесущему органу або здійснюють польоти в просторі під дією сили інерції. Інерційні До. діляться на 2 групи: що коливаються, характеризуються значними амплітудами і малою частотою коливань, і вібраційні — з малою амплітудою і великою частотою коливань.
В тому, що простому коливається До. жолоб знаходиться на пружних стійках, жорстко закріплених на опорній рамі під деяким кутом до вертикалі. Кривошипний механізм з приводом від електродвигуна повідомляє жолобу змінні по напряму рухи. Жолоб при русі вперед трохи піднімається, а при русі назад опускається (гойдається). При цьому міняється тиск вантажу на жолоб. При русі жолоба назад вантаж ковзає по ньому вперед, просуваючись на деяку відстань.
На вібраційному До. вантажу повідомляються несиметричні коливання. В результаті плавного руху труби До. вгору і різкого руху вниз відбувається відрив часток вантажу від поверхні труби і переміщення їх уздовж неї. Залежно від діаметру жолоба — 350, 500 і 750 мм — продуктивність вібраційних До. відповідно складає 50, 75 і 150 т/ч. Найбільш висока можлива продуктивність 400 т/ч, найбільша довжина — 100 м. Спеціальні типи вібраційних До. застосовують також для переміщення вантажів вгору (див. Вібраційний транспорт ) .
Техніко-економічна характеристика. Ефективність використання До. у технологічному процесі будь-якого виробництва залежить від того, наскільки тип і параметри вибраного До. відповідають властивостям вантажу і умовам, в яких протікає технологічний процес. До таких умов відносяться: продуктивність, довжина транспортування, форма траси і напрям переміщення (горизонтальне, похиле, вертикальне, комбіноване); умови завантаження і розвантаження К.; розміри вантажу, його форма, питома щільність, абразивність, куськоватость, вологість, температура і пр.; ритм і інтенсивність подачі, а також різні місцеві чинники.
Продуктивність Q будь-якого До. при переміщенні штучних вантажів масою G кг із швидкістю u м/сек визначається по формулі:
т/ч,
де а — відстань між вантажами на До. у м. При переміщенні сипких або рідких вантажів
т/ч,
де в — коефіцієнт міри заповнення ємкості вантажем; l — об'єм ємкості в л , в якій переміщається вантаж; g — об'ємна маса в т/м 3 ; u — швидкість в м/сек; а — відстань між ємкостями на До. у м. При переміщенні сипких вантажів безперервним потоком: Q=3,6q · u або Q=3600f · u · g м/ч, де q — питоме навантаження в кг/м-коді; F — перетин потоку в м-коді 2 , u — швидкість в м/сек.
Приведені вирази показують, що як продуктивність До., так і визначальні її параметри ( u, а, F і ін.) не залежать від відстані, на яку переміщається вантаж.(грузинський) У цьому полягає основна перевага машин безперервної дії, до яких відносяться До., перед машинами циклічної дії (наприклад, підіймальними кранами, автомашинами, вагонетками і ін.).
Міра технічної досконалості До. визначається питомою витратою потужності K N :
K N = ( квт · ч ) /т,
де N q — потужність в квт; Q — продуктивність в т/ч.
Висока продуктивність, простота конструкції і порівняно невисока вартість, можливість виконання на До. різних технологічних операцій, невисока трудомісткість робіт, забезпечення безпеки праці, поліпшення його умов — все це зумовило широке вживання До. у всіх областях народного господарства: у чорній і кольоровій металургії, машинобудуванні, гірською, хімічною, харчовою і ін. галузях промисловості. У промисловому виробництві До. є невід'ємною складовою частиною технологічного процесу. До. дозволяють встановлювати і регулювати темп виробництва, забезпечувати його ритмічність. Будучи основним засобом комплексної механізації і автоматизації транспортних і погрузо-розвантажувальніх процесів, і потокових технологічних операцій, До. в той же час звільняють робітників від важких і трудомістких транспортних і навантажувально-розвантажувальних робіт, роблять їх працю продуктивнішою. Широка конвеєризація складає одну з характерних меж розвиненого промислового виробництва. Це пояснюється тим, що впровадження завантажувальних і розвантажувальних, дозувань, рахункових і таких, що зважують автоматів, автоматичних очищаючих і змащуючих пристроїв, всілякої контрольної, захисної і блокувальної апаратури, засоби автоматичного управління неможливо без вживання До. як одній з основних машин, комплектуючих систему автоматизованого виробництва. Про вживання До. див.(дивися) також в статтях Механізація виробництва, Автоматизація виробництва, Конвеєрна збірка, Пневматичний транспорт .
Літ.: Зенков Р. Л., Петров М. М., Конвеєри великої потужності, М., 1964; Співаковський А. О., Потапов М. Р., Котів М. А., Кар'єрний конвеєрний транспорт, М., 1965; Транспортуючі і перевантажувальні машини для комплексної механізації харчових виробництв, під ред. А. Я. Соколова, М., 1964; Співаковський А. О., Дячків Ст Н., Транспортуючі машини, 2 видавництва, М., 1968.