Гіроскопічний інтегратор , гіроскопічний пристрій, що містить т. і. інтегруючий гіроскоп, який служить для визначення інтеграла від величини, що впливає на нього. Розрізняють Р. і. кутовій швидкості і Г. і. лінійних прискорень.
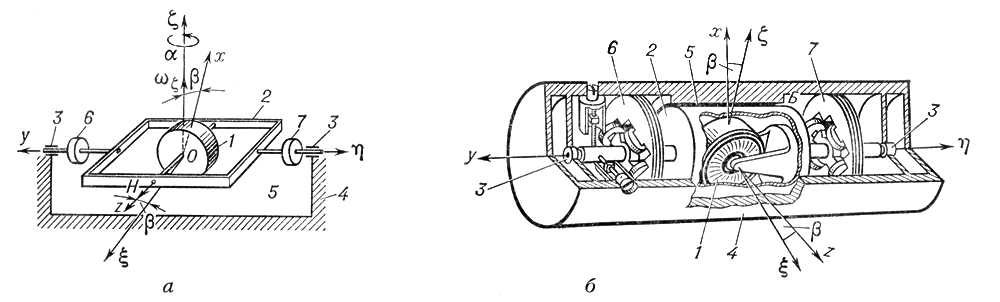
Р. і. кутовій швидкості служить для визначення кута повороту об'єкту. Найбільш досконалим є поплавцевий Р. і. ( мал. 1 ). Ротор 1 гіроскопа встановлений в рамці 2 , що є поплавцем циліндрової форми; вісь Oy ( Oh ) обертання поплавця встановлена в підшипниках, розташованих в корпусі 4 приладу, що має також циліндрову форму. Зазор 5 між поплавцем і корпусом, а також весь вільний простір усередині корпусу заповнений рідиною з великою щільністю. Вказана система утворює рідинний підвіс. Підіймальна сила рідини має дорівнювати вазі гироузла; при цьому підшипники 3 підвісу виявляються практично повністю розвантаженими; рідина в зазорі між циліндровими поверхнями поплавця і корпусу приладу забезпечує демпфування, момент якого пропорційний кутовій швидкості обертання поплавця. Вживання рідинного підвісу частково оберігає вісь підвісу (вісь обертання поплавця) від дії на неї вібрацій, ударів і ін. У приладі передбачено автоматичне регулювання температури, що необхідне для підтримки постійності щільності і в'язкості рідини, а також постійності положення центру тяжіння поплавцевого гироузла і центру тиску рідини відносно осі обертання гироузла.
При повороті об'єкту довкола осі Oz , (вхідна вісь або вісь чутливості) з кутовою швидкістю w z виникає гіроскопічний момент Hw z , де Н — кінетичний момент гіроскопа, що викликає обертання поплавця (рамки) довкола осі Oh (вихідна вісь) з кутовою швидкістю b (де b — кут повороту поплавця). При цьому на поплавець починає діяти момент демпфування bb ( b — коефіцієнт демпфування), що врівноважує гіроскопічний момент. Рівність bb=hw z після інтеграції дає bb=ha , що дозволяє по куту b повороту поплавця довкола осі Oh , що знімається з датчика 6 , визначати шуканий кут повороту а об'єкту довкола осі Oz .
Поплавцевий Р. і. є прецизійним приладом. Основні достоїнства двоступеневих поплавцевих Р. і. полягають у високій точності (власний відхід — десяті і соті долі градуса в 1 ч ); малій схильності вібраційним, ударним і ін. обурюють діям; можливості використання для вирішення широкого класу завдань, що покладаються на гіроскопічні пристрої. Поплавцеві Р. і. застосовуються в гіроскопах напряму, гіровертикалях, системах гіроскопічної стабілізації, використовуваних на різних літальних апаратах і кораблях.
Р. і. лінійних прискорень служить для визначення складової лінійної швидкості центру тяжіння об'єкту уздовж заданого напряму. Р. і. є гіроскоп з трьома мірами свободи, центр тяжіння якого зміщений відносно точки підвісу. Унаслідок цього Р. і. чутливий до поступальних прискорень об'єкту, т.к. возникающий при цьому момент сил інерції викликає прецессию гіроскопа з кутовою швидкістю, пропорційною вказаному моменту, тобто величині прискорення об'єкту. Тоді кут прецессиі буде пропорційний лінійній швидкості об'єкту, що дозволяє вимірявши цей кут, знайти шукану швидкість.
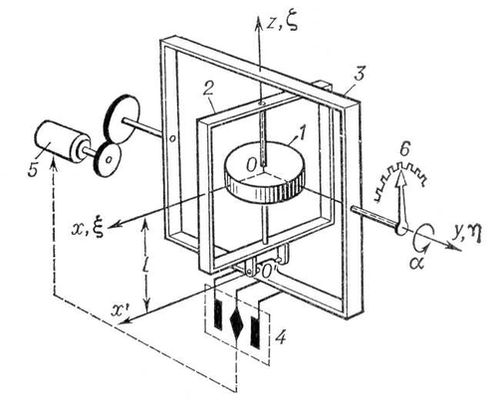
Р. і. реагує на прискорення об'єкту, що здається, тобто на різницю між абсолютним прискоренням об'єкту і гравітаційним прискоренням (прискоренням сили тяжіння). Унаслідок цього свідчення приладу пропорційні інтегралу від прискорення, що здається, тобто швидкості, що здається. На мал. 2 приведена принципова схема Р. і. з трьохстатечним неврівноваженим (важким) гіроскопом гиромаятникового типа. Ротор 1 , встановлений в гирокамере 2, статично неврівноважений відносно осі гойдання O''x'' в зовнішньому кардановому кільці (рамці) 3 ; відносно осі Oh ( Оу ) обертання рамки система повністю урівноважена. Для забезпечення перпендикулярності осі Oz гіроскопа до осі Oh ( Оу ) служить система корекції, що складається з контактного пристосування 4 і керованого їм стабілізуючого двигуна 5 .
Р. і. реагує на складову w лінійного прискорення об'єкту уздовж осі Oh . Свідчення Р. і. (величина лінійної швидкості об'єкту), пропорційні куту а повороту рамки 3 , знімаються з потенціометра 6 . Якщо вісь Oh ( Оу ), співпадаюча з подовжньою віссю об'єкту, горизонтальна, то з формули для кутової швидкості прецессиі зовнішньої рамки після інтеграції виходить
де v 0 — початкова швидкість уздовж осі Oh , Н— кінетичний момент гіроскопа; т — маса ротора і гирокамери; 1 — зсув уздовж осі Oz центру тяжіння ротора і гирокамери відносно точки підвісу; v — шукана складова швидкості об'єкту уздовж осі Oh , яка і визначається по значенню кута, що знімається з потенціометра 6.
Якщо об'єкт рухається під кутом до плоскості горизонту (зокрема, вертикально), то для визначення швидкості v об'єкту з кута а слід відняти той кут, на який обернеться рамка під дією сили тяжіння.
Р. і. лінійних прискорень застосовуються головним чином в ракетній техніці. Можливе вживання Р. і. у гироїнерциальной вертикалі (див. Гіровертикаль ), де він замінює акселерометр і інтегратор.