Мореплавна астрономія, розділ практичній астрономії, що задовольняє потреби судноводіння. Предметом М. а. є розробка способів визначення по небесних світилах і навігаційних штучних супутниках Землі (див. Навігаційний супутник ) місця судна в море і поправки приладів курсоуказанія. М. а. входить до складу науки про судноводінні .
Визначення місця судна в морі, тобто його географічної широти j і довготи l, виробляється за допомогою виміру висот світив над видимим морським горизонтом або над плоскістю штучного горизонту, що створюється на судні різними способами. Вживання кутомірних приладів з штучним горизонтом розширило можливості визначення місця судна астрономічними способами, а також підвищило точність виміру висот і світил.
Кожне значення h дійсної висоти світила (див. Небесні координати . ) дозволяє отримати одне рівняння для визначення координат судна, тому для визначення місця судна в морі необхідно не менше двох вимірів висот світив. Вирішення сферичного трикутника з вершинами в полюсі світу, зеніті спостерігача і місці світила, тобто так званого паралактичного трикутника, приводить до рівняння:
sin h = sinj × sind + cosj × cosd × cos( t гр + l), (1)
де d і t гр — відміна і грінвічський годинний кут світила відповідно. Величини d і t гр вибираються з морського астрономічного щорічника на момент спостережень. Довгота l відлічується к В. від грінвічського меридіана: t гр + l = t м-код є місцевий годинний кут світила. Коли світило знаходиться на меридіані спостерігача у верхній кульмінації ( t м-код = 0), те рівняння (1) дає наступне рішення: j = d ± (90° — Н ), де Н — висота світила у верхній кульмінації, т.з. мерідіанальная висота; знак мінус береться в разі кульмінації світила до С. від зеніту.
Якщо рівняння (1) вирішити відносно t м-код , то вийде наступне вираження:
cos t м-код = sin h × secj × secd — tgj × tgd. (2)
Знаючи широту j свого місця, можна по формулі (2) отримати і довготу l = t м-код — t гр .
По двох вимірах висот можна визначити і широту, і довготу місця; при більшому числі вимірів можна також оцінити і точність виробленого визначення. Користуючись т.з. счислімим местомом судна, тобто координатами (j е , l е ) місця, знайденими графічно або аналітично по курсу і пройденному відстані, можна кожне з отриманих рівнянь представити у вигляді рівнянь помилок або геометрично тлумачити його як висотну лінію положення. Рівняння лінії положення має вигляд:
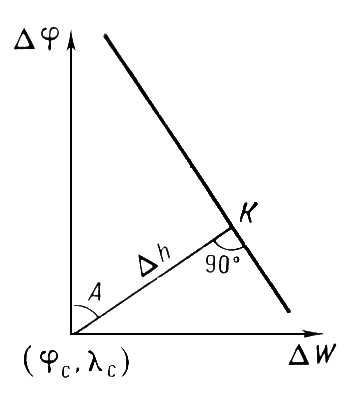
D h = Dj×cos A + DW × sin A . (3)
Для побудови лінії положення поєднують счислімоє місце корабля (j е , l е ) з початком координат (див. мал. ) і відкладають по одній осі приріст широти Dj, а по іншій — приріст отшествія D W = Dl×cosj. Якщо відкласти від счислімого місця по напряму, визначуваному азимутом А світила, різниця D h = h — h e між висотою світила, знайденою із спостережень, і його счислімой висотою, обчисленою по счислімим координатах, то знайдеться точка До , звана визначальною крапкою. Лінія положення проходить через визначальну крапку по напряму, перпендикулярному азимуту світила.
Місце судна визначається точкою пересічення двох ліній положення, постійних і спостережуваних два світив. В разі більшого числа спостережень лінії положення, як правило, не перетинаються в одній крапці, а утворюють фігуру погрішності. Вероятнейшєє місце судна може бути знайдене по цій фігурі або графічними прийомами, або аналітично.
Визначення поправки приладів курсоуказанія виробляється порівнянням наблюденного пеленга на світило з азимутом А цього світила, розрахованим по відомій його відміні d, годинному куту t м-коду = t гр + l і широті місця спостереження. Азимут А може бути обчислений за формулою:
ctg A = cosj · tgd · cosec t м-код — sinj · ctg t м-код . (4)
В тих випадках, коли одночасно з пеленгацією світила вимірюється і його висота, азимут може бути розрахований по одній з формул:
sin A = cosd · sin t м-код · sec h , (5)
cos A = secj · sind · sec h — tgj · tg h . (6)
Для розрахунку азимута світила видані спеціальні таблиці.
Висота світила над видимим морським горизонтом вимірюється секстантом (секстаном).
Відлік, отриманий на лімбі секстанта, для визначення висоти світила h над дійсним горизонтом виправляється шляхом введення інструментальної поправки секстанта, поправки індексу і поправок, що враховують нахил видимого горизонту, рефракцію, півдіаметр світила і його паралакс.
Історична довідка. Вже в глибокій старовині для орієнтування на незнайомій місцевості і визначення напряму дорозі використовувалися спостереження небесних світил. Зростання промисловості і торгівлі і пов'язане з цим розширення мореплавання з'явилися причиною розвитку методів і конструювання приладів, що почався в 15 ст, для визначення місця судна у відкритому морі. Широкого поширення набули астрономічні інструменти, пристосовані для спостережень світив на суднах, — градштоки, відбивні квадранти, астролябії, арміллярниє сфери . Були обчислені ефемериди Сонця і планет, необхідні при виконанні спостережень. В цей час з астрономічних спостережень уміли визначати лише широту місця. У 16—17 вв.(століття) були висловлені ідеї визначення довготи, засновані на спостереженнях кутових відстаней між Місяцем і зірками і затьмарень супутників Юпітера. Точний метод визначення довготи місця, в основі якого лежить обчислення різниці між місцевим годинним кутом світила і його значенням на момент спостережень для меридіана Грінвіча (l = t м-код — t гр ), увійшов до практики М. а. лише у 2-ій половині 18 ст, коли був сконструйований хронометр.
З початку 19 ст розробляється теорія спільного визначення широти і довготи місця; у 1808 йому.(німецький) математика К. Гаусс запропонував метод, що вимагає рішень 5 рівнянь; у 1824 русявий.(російський) геодезист Ф. Ф. Шуберт опублікував оригінальний метод спільного визначення j і l. Проте ці методи виявилися незручними для практичного вживання. У 1843 американський моряк Т. Сомнер опублікував спосіб визначення місця судна, заснований на тому, що ізолінія, відповідна значенню виміряної висоти, тобто круг рівних висот, на невеликому протязі зображається на карті прямою лінією (див. Сомнера спосіб ). Висотні лінії положення він будував по точках їх пересічення з двома паралелями, близькими до паралелі счислімого місця. Російський військовий моряк А. А. Акимов запропонував (опублікував в 1849) інший спосіб побудови лінії положення — по одній точці її пересічення з счислімой паралеллю і по її напряму; при цьому вперше було використано властивість перпендикулярності висотної лінії положення до напряму на світило. У 1875 французький моряк М. Сент-Ілер запропонував спосіб проведення висотної лінії положення через визначальну крапку перпендикулярно напряму на світило. Цей спосіб уживається і в 20 ст Велике значення в розробці сучасних методів М. а. і в послідовному застосуванні узагальненого методу ліній положення до вирішення астрономічних завдань мають роботи радянських учених Н. Н. Матусевіча і В. Ст Каврайського.
Літ.: Матусевіч Н. Н., Мореплавна астрономія, П., 1922; Белобров А. П., Морехідна астрономія, Л., 1954; Курс кораблеводіння, т. 1—6, Л., 1958—68; Космічні маяки і навігація, [М.], 1964; Dutton''s. Navigation and piloting, 2 ed., Annapolis, 1958; Kershner R. B., Transit program results, «Asronautics», 1961, v. 6 № 5.