Частотний метод в теорії автоматичного управління, метод оцінки динамічних властивостей системи автоматичного управління, заснований на використанні її частотних характеристик, що виражають сталу реакцію системи на вхідний гармонійний сигнал. Стала реакція стаціонарної лінійної системи на вхідний сигнал x 1 = A 1 e j w t є також гармонійним сигналом x 2 = A 2 . e j ( w t+ j) . Вихідний і вхідний сигнали зв'язані через комплексну передавальну функцію x 2 = W ( j () x 1 , модуль якої виражає відношення амплітуд сигналів
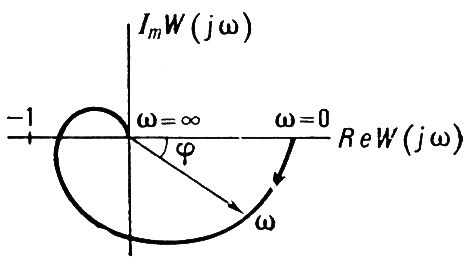
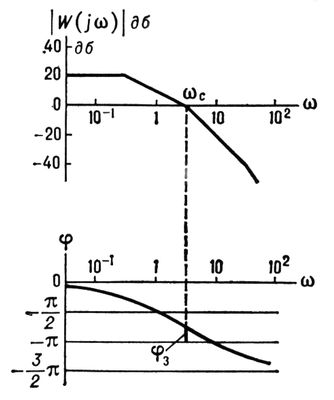
а аргумент W ( j w) — фазовий сдвіг j(w) між x 2 і x 1 . Годограф W ( j w) на комплексній плоскості при зміні w від 0 до +¥ ( мал. 1 ) називають амплитудно-фазовою характеристикою (АФХ). Кожній точці годографа відповідає визначена частота. Довжина вектора, проведеного з початку координат в точку АФХ, відповідну частоті w, рівна ½ W ( j w)½, а фазове зрушення вектора відносно речова позитивна піввісь — аргументу W ( j w) . Залежність модуля і аргументу від частоти виражається амплітудно-частотною і фазовою частотною характеристиками (АЧХ і ФЧХ). При побудові логарифмічною амплітудно-частотною і фазовою частотною характеристик (ЛАЧХ і ЛФЧХ) по осі абсцис відкладають в логарифмічному масштабі частоту, а по осях ординат в лінійному масштабі — значення модуля, виражене в децибеллах ½ W ( j w)½ дб (для ЛАЧХ), і аргумент j(w) (для ЛФЧХ) ( мал. 2 ). Частотні характеристики будують або по комплексній передавальній функції, отриманій з диференціального рівняння системи, або за результатами виміру відношення амплітуд і фазового зрушення між сигналами при різній частоті. Частотні характеристики (АФХ або ЛАЧХ і ЛФЧХ) використовують для дослідження стійкості систем автоматичного управління і якісних показників перехідних процесів в ній. У теорії автоматичного регулювання Ч. м. був введений в 1936—38 А. Ст Міхайловим.
Використовуючи критерій Найквіста, можна судити про стійкості замкнутої лінійної системи (тобто системи із зворотним зв'язком) по АФХ розімкненої системи: замкнута система стійка, якщо АФХ розімкненої системи не охоплює критичної крапки з координатами — 1,0 ( мал. 1 ). Стійкість замкнутої системи можна оцінювати і безпосередньо по ЛАЧХ і ЛФЧХ розімкненої системи: замкнута система стійка, якщо запас по фазі j 3 = p — ½j(w) з ½положителен ( мал. 2 ) (w з — частота зрізу, при якій ЛАЧХ пересікає вісь абсцис). Частота зрізу може служити мірою швидкодії системи, а запас по фазі — мірою міри загасання вільних коливань в ній. На базі логарифмічних частотних характеристик і критерію Найквіста розвинені вельми ефективні методи синтезу пристроїв, що коректують, забезпечують необхідні динамічні властивості замкнутої системи. Аналогічні Ч. м. були розроблені для аналізу і синтезу лінійних імпульсних систем. Якісні показники перехідного процесу в лінійній системі оцінюють по перехідній характеристиці, що виражає реакцію системи на вхідний стрибкоподібний сигнал. Радянський учений В. В. Солодовников запропонував методи побудови і оцінки властивостей перехідної характеристики по речовій частотній характеристиці Р (w)= REW ( j w) . Для нелінійних замкнутих систем на основі Ч. м. радянський учений Л.С. Гольдфарб розробив критерій існування і стійкості автоколивань, румунського математика В. М. Попов запропонував критерій абсолютної стійкості.
Літ.: Воронів А. А., Основи теорії автоматичного управління, ч. 1—2, М., 1965—66; Теорія автоматичного управління, ч. 1—2, М., 1968—72.