Стійкість руху, одне з найважливіших понять механіки. Рух будь-якої механічної системи, наприклад машини, гіроскопічного пристрою, літака, снаряда і т.п., залежить від сил, що діють, і т.з. початкових умов, тобто від положень і швидкостей точок системи у момент початку руху. Знаючи ці сили і початкові умови, можна теоретично розрахувати, як рухатиметься система. Рух, відповідний цьому розрахунку, називається необуреним. Але оскільки всі виміри виробляються з тією або іншою мірою точності, то на практиці дійсні значення початкових умов будуть зазвичай декілька відрізнятися від розрахункових. Крім того, механічна система може під час руху піддатися незначним випадковим діям, не врахованим при розрахунку, що теж еквівалентно зміні початкових умов. Що виникають по разним причинам відхилення початкових умов від їх розрахункових значень, називаються початковими обуреннями, а рух, який система здійснюватиме за наявності цих обурень, – обуреним рухом.
Вплив початкових обурень на характеристики руху системи (траєкторії її крапок, їх швидкості і т.п.) може бути двояким. Якщо при досить малих початкових обуреннях яких-небудь з характеристик у все подальший час мало відрізняється від того значення, яке вона повинна мати в необуреному русі, той рух системи по відношенню до цієї характеристики називається стійким. Якщо ж при скільки завгодно малих, але не рівних нулю початкових обуреннях дана характеристика з часом все більш і більш відрізнятиметься від значення, яке вона повинна мати в необуреному русі, то рух системи по відношенню до цієї характеристики називається нестійким. Ці визначення відповідають визначенню В. д. по А. М. Ляпунову. Умови, при яких рух механічної системи є стійким, називаються критеріями стійкості.
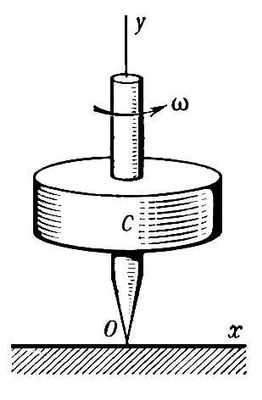
Як приклад розглянемо гіроскоп (дзига), вісь якого вертикальна і який обертається довкола цієї осі з кутовою швидкістю ( мал. ). Теоретично вісь гіроскопа повинна залишатися вертикальною при будь-якому значенні w, але фактично, коли w менше деякої величини w кр , вісь при будь-якому малому обуренні (поштовху) усе більш відхилятиметься від вертикалі. Якщо ж w більше w кр , то малі обурення практично напрям осі не змінять. Отже, при w < w кр гіроскоп по відношенню до напряму його осі нестійкий, а при w> w кр стійкий. Остання нерівність і є критерієм стійкості, при цьому w кр = , де Р вага гіроскопа, а відстань від точки опори Про до центру тяжіння З , I x і I в – моменти інерції гіроскопа відносно осей х і в відповідно.
Теорія В. д. має важливе практичне значення для багатьох областей техніки, т.к. У. д. повинні володіти різного роду двигуни, автомобілі, літаки, ракети, гіроскопічні прилади, системи автоматичного регулювання і ін. У небесній механіці проблема В. д. виникає при вивченні питання про тривалість збереження структури сонячної системи, подвійних зірок і ін.
Літ.: Ляпунов А. М., Загальне завдання про стійкість руху, М. – Л., 1950; Четаєв Н. Р., Стійкість руху, 2 видавництва, М., 1955; Дубошин Р. Н., Основи теорії стійкості руху, [М.], 1952; Красовський Н. Н., Деякі завдання теорії стійкості руху, М. 1959; Малкин І. Р., Теорія стійкості руху, М. – Л., 1952; Меркин Д. Р., Введення в теорію стійкості руху, М., 1971 (літ.).