Пошукова система управління, система автоматичного управління, в якій дії, що управляють, методом пошуку автоматично змінюються т. о., щоб здійснювалося найкраще (у якомусь сенсі) управління об'єктом; при цьому характеристики об'єкту або зовнішні обурення можуть змінюватися невідомим заздалегідь чином. Принцип автоматичного пошуку лежить в основі дії систем, що пристосовуються . П. с. істотно відрізняються від стежачих систем і систем стабілізації без пошуку (в т.ч. систем програмного регулювання), в яких усувається до допустимих меж розузгодження між заданими значеннями регульованих параметрів і їх поточними або середніми значеннями дорогою дії на керівники змінні x ( t ) , залежного від цього розузгодження; при цьому потрібний, щоб відношення вихідних параметрів в ( t ) об'єкту управління до його вхідних параметрів x ( t ) не міняло знак:
const. (1)
Проте для безлічі різних об'єктів, технологічних і ін. процесів типове те, що їх статичні і динамічні характеристики можуть змінюватися довільно. Такі, наприклад, політ літака, процеси горіння, багато хімічних реакцій і ін. При цьому часто, поряд з порушенням умови (1), між цільовими функціями (що характеризують мету управління) і вхідною дією є статичний взаємозв'язок екстремального вигляду. У таких системах кількість початкової інформації про об'єкт недостатньо для досягнення мети управління. Природна дорога заповнення бракуючій інформації — визначення її в процесі роботи.
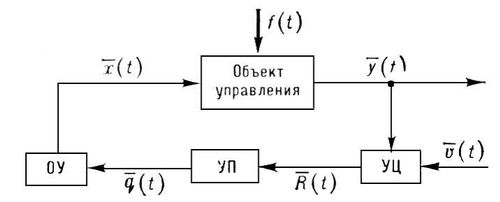
Структурна схема П. с. показана на рис . Стан об'єкту управління визначається діями , що управляють = [ x 1 ( t ) ..., x m ( t )], зовнішніми обуреннями = [ f 1 ( t ) ..., f до ( t )] і вихідними параметрами = [ y 1 ( t ) ., y n ( t )] . В П. с. входять: пристрій формування мети управління (УЦ), пристрій організації пошуку (УП) і органи управління (ОУ). УЦ складається з вимірювального і обчислювального пристроїв і за показниками стану об'єкту виробляє показник мети управління [ x ( t )]. Функціонал [ x ( t )] може змінюватися і перенастроюватися залежно від змінних = [u 1 ( t ) ., u i ( t )]. УП включає пристрої логічної дії і залежності від зміни [ x ( t )]; воно виробляє командні сигнали , необхідні для наближення системи до заданого значення показника мети управління.
Пошук здійснюється таким чином: на вхід об'єкту подаються пробні дії і оцінюється реакція на них об'єкту, що виявляється у вигляді зміни значення цільовій функції ( t ) ; далі в УП визначаються ті дії, які змінять показник мети в потрібну сторону; услід за цим виробляються і подаються на вхід об'єкту відповідні сигнали, тобто прикладаються робочі дії. Потім на об'єкт управління знову подаються пошукові дії і цикл повторюється.
Найбільш поширені методи пошуку: метод Гауса — Зейделя, при якому послідовно відшукується екстремум виходу по 1-ій, 2-ій..., m -й координаті вхідної дії; метод градієнта, що полягає в тому, що нова вхідна дія виходить з попереднього в результаті руху системи по градієнту вихідного функціонала; метод випадкового пошуку, при якому використовуються пробні зсуви у випадкових напрямах; метод стохастичної апроксимації, що полягає в послідовному наближенні до екстремуму з обліком результатів попередніх пошукових кроків, з поступовим зменшенням розміру кроку.
По-перше П. с. потрібно було відшукувати і підтримувати дії, що управляють, забезпечують найбільші або найменші (екстремальні) значення цільової функції (наприклад, найбільшу дальність польоту літака, найбільший ккд(коефіцієнт корисної дії) пристрої, найбільшу температуру в топці, найменшу вартість продукції і т.д.). Такі П. с. називаються системами екстремального регулювання (СЕР) або екстремальними системами. Ідея екстремального регулювання як нового напряму в розвитку систем автоматичного управління вперше була висунута в СРСР (Ст Ст Казакевіч, 1944). Головна перевага екстремальних систем полягає в тому, що вони не вимагають значної початкової інформації про керований об'єкт, а також високу точність вимірювальної апаратури, що дає поточну інформацію про об'єкт, — ця апаратура повинна лише мати чутливість, достатню для характеристики тенденції (напрями) зміни контрольованих параметрів.
Часто П. с. використовується спільно з моделлю об'єкту (див. Моделювання ) . В цьому випадку оптимальне значення параметрів об'єкту вибираються методом пошуку не на самому об'єкті, а на його моделі. Потім значення цих параметрів встановлюються на об'єкті. Подібні системи застосовують, наприклад, для автоматичного керування літаком (автопілот).
П. с. застосовують також для стабілізації регульованого параметра. Це необхідно у тому випадку, коли порушується умова (1). При цьому цільова функція може мати вигляд
або,
( — задане значення вихідного параметра), причому П. с. повинна відшукувати мінімум ( t ) .
Літ.: Казакевіч Ст Ст, Про екстремальне регулювання, в збірці: Автоматичне управління і обчислювальна техніка, ст 6, М., 1964; Фельдбаум А. А., Обчислювальні пристрої в автоматичних системах, М-коді,, 1959; Красовський А. А., Динаміка безперервних самонастраївающнхся систем, М., 1963; Первозванський А. А., Пошук, М., 1970; Растрігин Л. А., Системи екстремального управління, М., 1974.