Летательный аппарат, устройство для управляемого полёта в атмосфере планеты или космическом пространстве. Полёт Л. а. представляет собой движение над твердой и жидкой поверхностью планеты или в межпланетном пространстве. Л. а. используются для перевозки людей и грузов, выполнения с.-х.(сельскохозяйственный), строительных и др. работ, для ведения научных исследований и в военных целях. Различают атмосферные и космические Л. а. Атмосферные Л. а. делятся, в свою очередь, на 2 класса: аппараты тяжелее воздуха и аппараты легче воздуха.
Силы, действующие на Л. а. На Л. а. действует притяжение планеты и др. небесных тел, а при полёте в атмосфере — также и сопротивление среды. Действие этих сил преодолевается с помощью подъёмной силы и силы тяги. Подъёмная сила и сила тяги используются также для управления Л. а., т. е. для изменения величины и направления скорости полёта и положения Л. а. в пространстве.
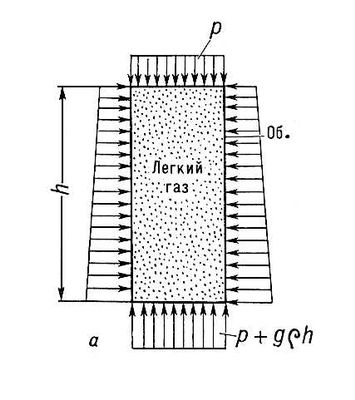
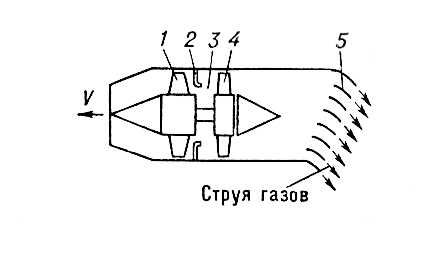
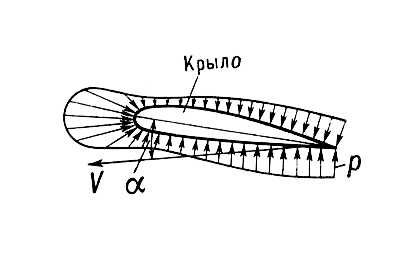
При создании подъёмной силы используются следующие принципы: аэростатический, аэродинамический и газодинамический. Аэростатическая сила, или архимедова сила, образуется из-за разности плотностей газа, заполняющего оболочку аппарата, и атмосферного газа (рис. 1а, 1б,) и приложена к внешней поверхности Л. а. (см. Архимеда закон). Она направлена вертикально вверх. Аэродинамическая сила также приложена к внешней поверхности Л. а. (см. Аэродинамические сила и момент). Образуется из-за перепада давления на поверхности Л. а. при несимметричном обтекании его газообразной средой атмосферы (рис. 2а, 2б, 2в, 2г). Составляющая аэродинамической силы, перпендикулярная направлению полёта, образует подъёмную силу, а составляющая, параллельная скорости полёта и направленная назад, — аэродинамическое сопротивление(лобовое сопротивление). Отношение подъёмной силы к силе лобового сопротивления называется аэродинамическим качеством. В газодинамическом принципе создания подъёмной силы используется давление газа, действующего на внутреннюю поверхность реактивного двигателя (рис. 3а, 3б).
Сила тяги, создаваемой воздушным винтом или реактивным двигателем, численно равна приращению количества движения рабочего вещества, отбрасываемого ими. Винт приводится во вращение двигателем (поршневым или газотурбинным). Реактивные двигатели делятся на воздушно-реактивные и ракетные. При создании тяги с помощью винта и воздушно-реактивного двигателя в качестве рабочего вещества используется атмосферный газ (воздух). Рабочее вещество для ракетного двигателятранспортируется на самом Л. а., поэтому ракетный двигатель можно применять как на атмосферных, так и на космических Л. а. Если направление силы, создаваемой винтом или реактивным двигателем, наклонено к направлению полёта, то эту силу можно разложить на две составляющие. Составляющую, перпендикулярную направлению полёта, можно рассматривать как подъёмную силу, а составляющую, параллельную направлению полёта, — как тягу. Создание тяги и подъёмной силы связано с затратами энергии. Источником энергии может быть химическое или ядерное горючее, запасённое на борту Л. а. На космическом Л. а. возможно также использование солнечной энергии.
Обычно полёт Л. а. состоит из 3 основных этапов: взлёт (разбег, набор высоты), установившийся полёт (полёт с приблизительно постоянной скоростью), посадка (торможение, спуск до соприкосновения с поверхностью планеты, пробег). Некоторые этапы полёта могут отсутствовать или принимать специфическую форму. Для разбега Л. а. при взлёте обычно используется тяга двигателя, установленного на нём. Взлёт Л. а. может осуществляться также и с помощью дополнительных устройств вне Л. а. (катапульт и т.п. средств). На втором этапе, при установившемся прямолинейном полёте, равнодействующая всех сил, приложенных к Л. а., равна нулю. На третьем этапе полёта скорость постепенно уменьшается до небольшой величины, обеспечивающей безопасную посадку. Для этого необходима сила, почти уравновешивающая силу притяжения, и сила, тормозящая движение по горизонтали.
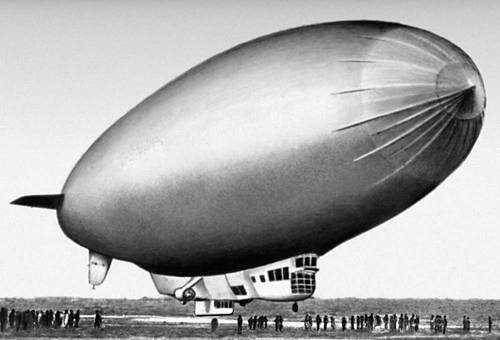
Л. а. легче воздуха (аэростат, дирижабль и др.). Подъёмная сила аппаратов этого класса имеет аэростатическую природу (см. Воздухоплавание). Аэростат развивает лишь подъёмную силу, горизонтальное перемещение его происходит под действием ветра. Управление аэростатом сводится к изменению высоты полёта путём изменения его массы и объёма. Дирижабль имеет воздушные винты, создающие тягу и приводимые во вращение двигателями. Кроме средств управления, применяемых на аэростате, на дирижабле используются аэродинамические органы управления.
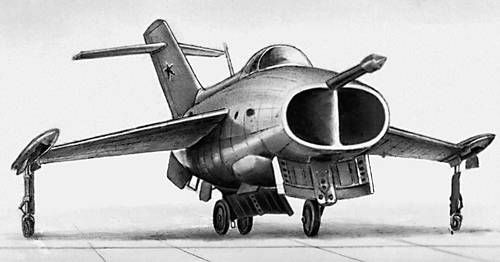
Л. а. тяжелее воздуха (самолёт, планёр, вертолёт, винтокрыл и др.). Подъёмная сила аппаратов этого класса имеет преимущественно аэродинамическую природу. В некоторых случаях используется также газодинамический принцип создания подъёмной силы. Наиболее распространённым Л. а. тяжелее воздуха является самолёт. Его подъёмная сила создаётся в основном крылом. Значительно меньшая доля приходится на подъёмную силу фюзеляжа и оперения. Рассматриваются проекты самолётов для полётов при гиперзвуковых скоростях, у которых подъёмная сила образуется в основном корпусом. Тяга самолёта создаётся с помощью поршневого, газотурбинного или воздушно-реактивного двигателя. Ракетный двигатель используется на самолёте редко (обычно в качестве ускорителя). На перспективном гиперзвуковом самолёте возможно применение ракетного двигателя как основного средства создания тяги. Для управления самолётом используются аэродинамические органы (рули высоты и направления, элероны и др.), а также регулирование тяги.
Подъёмная сила крыла изменяется приблизительно пропорционально квадрату скорости полёта. При малых скоростях подъёмной силы крыльев недостаточно для отрыва самолёта от поверхности Земли. Для каждого самолёта существует минимальная скорость, при которой подъёмная сила крыльев равна весу самолёта. Поэтому при взлёте необходим разбег для достижения её, а при посадке — пробег, чтобы погасить её до нуля. Это приводит к необходимости создания аэродромов со взлётно-посадочными полосами. Уменьшение минимальной скорости и соответствующее сокращение длины разбега и пробега самолёта достигается увеличением подъёмной силы крыльев посредством их механизации (см. Механизация крыла), сдува пограничного слоя с крыла, обдува крыла струями от винтов и др. способами.
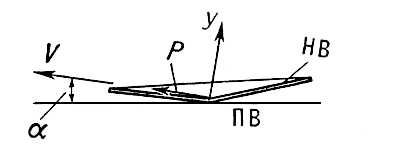
Подъёмная сила может быть создана и на неподвижном Л. а. Для этого его крылья должны двигаться относительно корпуса Л. а. Известны проекты Л. а. с машущими и колеблющимися крыльями (см.Орнитоптер). Применение нашёл вертолёт — Л. а. с несущим винтом, который можно рассматривать как систему крыльев, вращающихся в плоскости, близкой к горизонтальной. Наклоном плоскости вращения несущего винта к направлению полёта создаётся не только подъёмная сила, но и тяга. У винтокрыла подъёмная сила создаётся одновременно несущим винтом и крылом, а тяга — тянущим и несущим винтами. Существуют самолёты с винтами, плоскость вращения которых может изменяться от вертикальной до горизонтальной. Такие самолёты могут совершать вертикальные взлёт и посадку. Использование газодинамического принципа создания подъёмной силы позволяет и реактивному самолёту летать с малыми скоростями и даже «висеть», совершать вертикальные или укороченные взлёт и посадку. Это достигается отклонением вниз струи реактивного двигателя посредством поворотных сопл либо использованием специальных вертикально установленных двигателей.
Космические Л. а. (автоматическая межпланетная станция, искусственный спутник Земли, космический корабльи др.). Из-за большого своеобразия различных этапов космического полёта и для уменьшения массы космического Л. а. делается составным. Он состоит обычно из следующих автономных частей: стартовой ракеты, орбитального или межпланетного корабля, аппарата, спускаемого на поверхность планеты. Стартовая ракета разгоняет Л. а. до скорости, равной или превосходящей орбитальную. Управление ракетой осуществляется изменением значения и направления действия тяги ракетных двигателей, а при наличии на планете атмосферы — также посредством аэродинамических рулей. Орбитальным и межпланетным кораблями управляют с помощью ракетных двигателей. При дальних межпланетных перелётах ракетный двигатель целесообразно применять также для дополнительного разгона межпланетного корабля с целью уменьшения продолжительности перелёта. Эффективность использования рабочего вещества в двигателе тем выше, чем больше скорость истечения газа из него. В ракетных двигателях поток газа разгоняют путём его нагревания за счёт сжигания химического горючего и последующего расширения в сопле. Разрабатываются двигатели для космических Л. а., в которых поток газа разгоняется до более высоких скоростей, чем в ракетном двигателе (плазменный двигатель, электростатический ракетный двигатель). На окончательном этапе полёта космического Л. а. производится его торможение ракетным двигателем. Если планета лишена атмосферы, то ракетным двигателем пользуются вплоть до соприкосновения с её поверхностью. Если же планета имеет атмосферу, то используются также аэродинамические силы. Применение подъёмной силы позволяет снизить перегрузки, неблагоприятно действующие на человека. Управление Л. а. при спуске путём изменения его подъёмной силы позволяет повысить точность посадки. Рассматриваются проекты перспективных космических аппаратов, которые смогут взлетать с поверхности Земли и садиться на её поверхность подобно самолёту.