Гідроакустична станція , сукупність схемний і конструктивно зв'язаних акустичних, електричних і електронних приладів і пристроїв, за допомогою яких виробляється прийом або випромінювання або прийом і випромінювання акустичних коливань у воді.
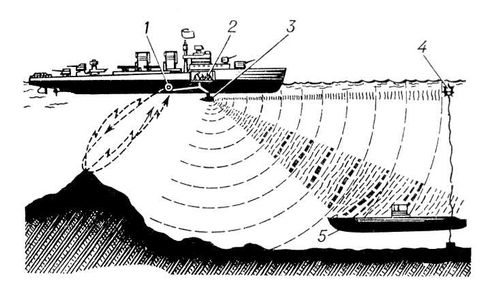
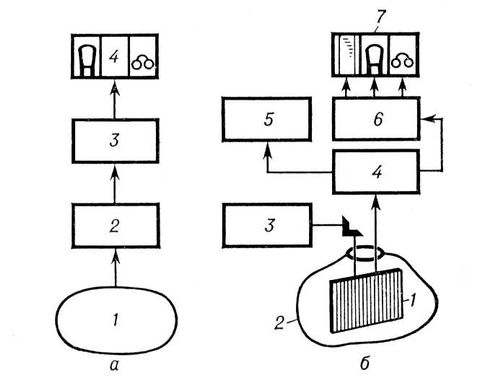
Розрізняють Р. с. що лише приймають акустичну енергію (пасивної дії) і пріємоїзлучающие (активної дії). Р. с. пасивної дії [шумопеленгатор ( мал. 1 , а), Р. с. розвідки, звукометрична станція і ін.] служать для виявлення і визначення напряму (пеленга) на шумлячий об'єкт (рухомий корабель, Р. с. активної дії і ін.) по створюваним об'єктом акустичним сигналам (шумам), а також для прослухування, аналізу і класифікації прийнятих сигналів. Пасивні Р. с. володіють скритністю дії: їх роботу не можна виявити. Р. с. активної дії [гідролокатор ( мал. 1 , би), риболокатор, ехолот і ін.] застосовують для виявлення, визначення напряму і відстані до об'єкту, повністю або частково зануреного у воду (підводного човна, надводного корабля, айсберга, косяка морського дна і т.д.). Досягається це посилкою короткочасних акустичних імпульсних сигналів у визначеному або на всіх напрямках і прийомом (під час паузи між посилками їх) після віддзеркалення від об'єкту. Активні Р. с. здатні виявляти як шумлячі, так і не шумлячі об'єкти, рухомі і нерухомі, але можуть бути виявлені і запеленговані по випромінюванню, що є деяким їх недоліком. До активним Р. с. також відносять станції звукоподводной зв'язку, гідроакустичні маяки, гідроакустичні лаги, ехоледомери і ін. акустичні станції і прилади. Детальніше про методи пеленгації і визначення місця розташування див.(дивися) в ст. Гідроакустика і Гидролокация .
Основними частинами пасивних Р. с. є: акустична система (антена), компенсатор, підсилювач, індикаторний пристрій. Активна Р. с., крім того, має також генератор і комутаційний пристрій, або перемикач «прийом — передача».
Акустична система Р. с. складається з багатьох електроакустичних перетворювачів (гідрофонів — в тих, що приймають Р. с., вібраторів — в пріємоїзлучающих Р. с.) для створення необхідної характеристики спрямованості прийому і випромінювання. Перетворювачі розміщуються (залежно від типа і призначення Р. с.) під днищем корабля на поворотно-висувному пристрої або в стаціонарному обтічнику, проникному для акустичних коливань, вбудовуються в зовнішню обшивку корабля, вмонтовуються в буксируваному кораблем або що опускається з вертольота контейнері, встановлюються поверх опорної конструкції на дні морить. Компенсатор вносить до змінних струмів, що протікають в електричних ланцюгах рознесених один від одного гідрофонів, зрушення фаз, еквівалентного різниці часу приходу акустичних коливань до цих гідрофонів. Чисельні значення цих зрушень показують кут між віссю характеристики спрямованості нерухомою акустичних системи і напрямом на об'єкт. Після посилення електричні сигнали подаються на індикаторний пристрій (телефон або електроннопроменеву трубку) для фіксації напряму на шумлячий об'єкт. Генератор активною Р. с. створює короткочасні електричні імпульсні сигнали, які потім випромінюються вібраторами у вигляді акустичних коливань. У паузах між ними відбиті від об'єктів сигнали приймаються тими ж вібраторами, які на цей час приєднуються перемикачем «прієм—передача» до підсилювача електричних коливань. Відстань до об'єктів визначається на індикаторному пристрої за часом запізнювання відбитого сигналу відносно прямого (випромінюваного).
Р. с., залежно від їх типа і призначення, працюють на частотах інфразвукового, звукового і (частіше) ультразвукового діапазонів (від десятків гц до сотень кгц ), випромінюють потужність від десятків Вт (при безперервному генеруванні) до сотень квт (у імпульсі), мають точність пеленгації від одиниць до доль градуса, залежно від методу пеленгації (максимальний, фазовий, амплитудно-фазовий), гостроти характеристики спрямованості, обумовленою частотою і розмірами акустичні системи, і способу індикації. Дальність дії Р. с. лежить в межах від сотень метрів до десятків і більш за км. і в основному залежить від параметрів станції, властивостей об'єкту (сили мети) або рівня його шумового випромінювання, що відображають, а також від фізичних явищ поширення звукових коливань у воді (рефракції і реверберації) і від рівня перешкод роботі Р. с., створюваних при русі свого корабля.
Р. с. встановлюють на підводних човнах, військових надводних кораблях ( мал. 2 ), вертольотах, на берегових об'єктах для вирішення завдань протичовнової оборони, пошуку противника, зв'язки підводних човнів один з одним і з надводними кораблями, вироблення даних для пуску ракето-торпед і торпед, безпеки плавання і ін. На транспортних, промислових і дослідницьких судах Р. с. застосовують для навігаційних потреб, пошуку скупчень риби, проведення океанографічних і гідрологічних робіт, зв'язку з водолазами і ін. цілей.
Літ.: Л Карлов. Би., Шошков Е. Н., Гідроакустика у військовій справі, М., 1963; Простаків А. Л., Гідроакустика в іноземних флотах, Л., 1964; його ж, Гідроакустика і корабель, Л., 1967; Краснов Ст Н., Локація з підводною човни, М., 1968; Хортон Дж., Основи гидролокациі, пер.(переведення) з англ.(англійський), Л., 1961.