Гидролокация (від гидро... і лат.(латинський) locatio — розміщення), визначення положення підводних об'єктів за допомогою звукових сигналів, що випромінюються самими об'єктами (пасивна локація) або що виникають в результаті віддзеркалення від підводних об'єктів штучно створюваних звукових сигналів (активна локація). Під терміном «Г.» розуміють виключно звукову локацію, оскільки звукові хвилі є єдиним відомим в даний час виглядом хвиль, що поширюються в морському середовищі без значного ослабіння. Р. має велике значення в навігації для виявлення невидимих підводних перешкод, при рибному лові для виявлення косяків і окремих крупних риб, в океанології як інструмент дослідження фізичних властивостей океану, картографування морського дна, пошуку затонулих судів і т.п., а також у військових цілях для виявлення підводних човнів, надводних кораблів і ін. і спостереження за ними, для визначення координат цілей при вживанні торпедної і ракетної зброї.
При пасивній локації (шумопеленгациі) за допомогою шумопеленгатора визначають напрям на джерело звуку (пеленг джерела), користуючись звуковим полем, що створюється самим джерелом. При цьому застосовують різні методи: повертають приймальню акустичну антену з гострою спрямованістю до положення, в якому прийнятий сигнал має максимальну інтенсивність (т.з. максимальний метод пеленгації); вимірюють різницю фаз між сигналами на виході двох рознесених в просторі антен (фазовий метод); визначають відносну різницю в часі прийому сигналів двома рознесеними антенами за допомогою виміру взаємною кореляції (кореляційний метод), а також шляхом комбінації цих методів. При пасивній локації відстань до об'єкту визначають по двох або декільком пеленгам, отриманим декількома приймальними системами, рознесеними на відстані, порівнянні з відстанню до лоцируємого об'єкту (метод тріангуляції); так визначається не лише положення шумлячого об'єкту, але і траєкторія його руху. Системи пасивною Р. застосовуються головним чином для гідроакустичного оснащення підводних човнів і надводних кораблів. Пасивною Р. користуються також при виявленні підводних шумлячих об'єктів за допомогою розподілених берегових і донних систем звукопріємников, дані від яких по підводному кабелю передаються на берегові системи обробки, а також за допомогою системи гідроакустичних радіобуїв, інформація від яких приймається по радіоканалу спеціальними літаками, що курсують в районі плавання буїв. Крім того, пасивне визначення напряму на шумлячий об'єкт є основою дії акустичних самонавідних торпед.
Якщо джерело звуку випромінює короткий звуковий імпульс, то положення джерела можна визначити по різницях часів приходу імпульсів, прийнятих ненапрямленими приймачами в трьох або більш рознесених по простору пунктах. В такий спосіб локалізації джерел користуються в береговій системі далекого виявлення судів, що терплять лихо у відкритому океані (система З ФАР); джерелом звуку при цьому служить вибух заряду, занурюваного на певну глибину.
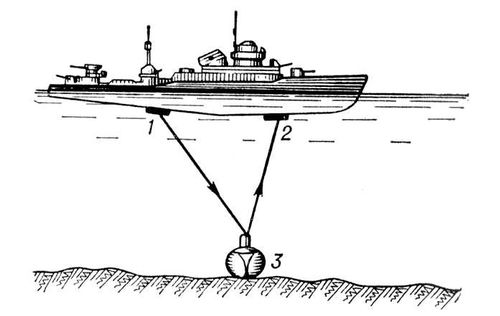
Системи активною Р. засновані на явищі звукового відлуння ( мал. ) і розрізняються методами тимчасовою модуляції посиланого сигналу і способами огляду простору. Для визначення дальності об'єкту найчастіше користуються імпульсною, частотною і шумовою модуляціями сигналу. При імпульсній модуляції відстань R до мети знаходиться за часом запізнювання t 0 відбитого імпульсу: R=ct 0 / 2, де з — швидкість поширення звуку в середовищі. При частотній модуляції частота f випромінюваного сигналу міняється з часом t по лінійному закону f (t)= f 0 +g t , де f 0 і g — постійні початкова частота і швидкість зміни частоти. Тому відбитий сигнал, прийнятий приймачем, відрізнятиметься по частоті від сигналу, що випромінюється в даний момент, т.к. прінятий сигнал є затриманим на якийсь час t 0 копію посланого сигналу, а частота випромінюваного сигналу за час t 0 змінилася згідно з приведеною формулою. Для нерухомої мети різниця частот буде постійною і рівною f _ = gt 0 . Виділивши різницеву частоту, визначають відстань до мети R по формулі R=cf_/2g . Аналогічна схема дії гідролокатора з шумовим випромінюванням і кореляційною обробкою сигналу.
Основною характеристикою гідролокаторів є дальність виявлення, яка залежить від потужності випромінюваного сигналу, від рівня акустичних перешкод і від умов поширення звуку у водному середовищі. Дальність виявлення зазвичай визначають по величині т.з. порогового сигналу, тобто сигналу мінімальної інтенсивності, ще помітного на тлі перешкод. Якщо перешкода і сигнал незалежні, то пороговий сигнал визначається відношенням повної енергії корисного сигналу до потужності перешкоди в даному частотному інтервалі. Т. о., дальність виявлення для систем з різними видами модуляції буде однаковою, якщо однакова їх повна енергія випромінювання. Якщо основна перешкода — хаотичне віддзеркалення сигналу від неоднородностей середовища (т.з. ревербераційна перешкода), то пороговий сигнал не залежить від потужності випромінюваного сигналу, а визначається виключно шириною смуги його частот; в цьому випадку ефективніші системи з частотною модуляцією сигналу і з шумовою посилкою.
Поряд з перешкодами на дальність виявлення робить вплив рефракція, що має місце в складних гідрологічних умовах. Сучасні гідролокатори здатні виявляти великі об'єкти, що відображають, в середньому на відстані декілька км. .
Літ.: Клюкин І. І., Підводний звук, Л., 1963; Сташкевіч А. П., Акустика морить, Л., 1966; Тюрін А. М., Сташкевіч А. П., Таранів Е. С., Основи гідроакустики, Л., 1966.