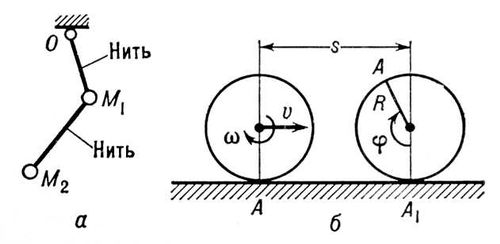
Голономні системи, механічні системи, в яких всі зв'язки (див. Зв'язки механічні ) є геометричними (голономними), тобто що накладають обмеження лише на положення (або переміщення за час руху) крапок і тіл системи, але не на величини їх швидкостей. Наприклад, подвійний маятник ( мал. а ) є Р. с.; в нім зв'язки (нитки) накладають обмеження лише на положення або переміщення вантажів M 1 і M 2 , але не на їх швидкості, які при русі можуть мати будь-які значення. Зв'язок, що накладає обмеження на швидкості крапок і тіл системи, тобто що встановлює між цими швидкостями певні співвідношення, називається кінематичним. Проте якщо ці співвідношення можна звести до геометричних, тобто до співвідношень між переміщеннями (або координатами) крапок і тіл системи, то такий зв'язок також є голономним. Наприклад, при коченні без ковзання колеса радіусу R по прямолінійній рейці ( мал. би ) швидкість u центру колеса і кутова швидкість w колеса зв'язані співвідношенням u= R w, але його можна звести до геометричного співвідношення s = R j між переміщенням s = Aa 1 центру і кутом повороту j колеса. Отже, це Р. с.
Кінематичні зв'язки, що не зводяться до геометричних, називаються неголономними, а механічні системи з такими зв'язками — неголономними системами . Розділення механічних систем на голономних і неголономних дуже істотно, оскільки ряд рівнянь, що дозволяють порівняно просто вирішувати завдання механіки (наприклад, Лагранжа рівняння механіки), застосуємо лише к Г. С.