автоматична система , що Виучується, виучувана машина, система, що пристосовується, алгоритм управління якої змінюється відповідно до оцінки результатів управління так, що з часом вона покращує свої характеристики і якість функціонування (див. Автоматичне управління ). Проектування і побудова технічних систем можливе лише на основі початковій апріорній інформації про характер процесів, що протікають в системі, і умовах, супроводжуючих роботу системи і що надають на неї обурюючу дію. Коли є повна початкова апріорна інформація, можна досить точний визначити такі значення характеристик проектованої системи, які забезпечують задану якість її функціонування; в цьому випадку немає необхідності в її вченні. За відсутності повної початкової інформації єдиної можливістю створення системи із заданою якістю функціонування є використання при її розробці принципу вчення.
Вчення — процес багатократних дій на систему і коректування її реакцій на ці дії. Зовнішнє коректування, або, як її ще називають, «заохочення» і «покарання», здійснюється «вчителем», якому відома бажана реакція на певні дії. «Вчителем» може бути або людина — оператор, або автомат. Саме на основі обробки контрольної (апостеріорною) інформації відбувається заповнення бракуючої початкової інформації. Якщо вчення здійснюється без зовнішнього повчального пристрою, то подібна система називається самонавчальною.
Вчення здійснюється за допомогою алгоритмів, які залежно від того, чи є О. а. с. дискретною або безперервною, є системою стохастичних різницевих або стохастичних диференціальних рівнянь. Алгоритми вчення реалізуються засобами обчислювальної техніки — цифровими або аналоговими обчислювальними машинами (зокрема, електроїнтеграторамі) або, нарешті, гібридними обчислювальними системами. У міру вчення О. а. с. нагромаджує досвід, на основі якого поступово виробляється необхідна реакція системи на зовнішні дії; О. а. с. — асимптотика оптимальна система, т.к. оптімальная реакція системи на зовнішніх обурення досягається не відразу, а з часом, в результаті вчення. Якнайповніше досліджені О. а. с. розпізнавання образів, ідентифікації, фільтрації і управління.
В О. а. с. розпізнавання образів до початку їх функціонування вся безліч тих, що підлягають пізнанню об'єктів підрозділяється на класи відповідно до вибраного принципу класифікації. Після цього складається словник ознак розпізнаваних об'єктів і створюються технічні засоби для визначення цих ознак. Якщо об'єм початкової апріорної інформації достатній для того, щоб виробити опис класів на мові ознак, то можна побудувати систему розпізнавання без вчення. Якщо ж об'єм первинної інформації недостатній для опису класів або такий опис по деяких причинах скласти незручно, то система розпізнавання образів може бути сформована за допомогою вчення. О. а. с. до початку функціонування в якості системи, що розпізнає, працює з «вчителем», який пред'являє системі повчальні об'єкти всіх виділених класів і вказує, до яких саме класів вони належать. Потім вчитель «іспитує» систему, коректуючи її відповіді до тих пір, поки середня кількість помилок не знизиться до бажаного рівня. В результаті вчення початкова апріорна інформація поповнюється, що і забезпечує О. а. с. розпізнавання можливість описувати класи за допомогою вибраного словника ознак. При цьому, чим точніше удається відновити опис класів на мові словника ознак, тим якісний працює система і тим рідше вона допускає помилки при розпізнаванні невідомих об'єктів або явищ (див. також Розпізнавання образів ).
О. а. с. фільтрації призначені для відділення корисного сигналу від перешкод, що необхідне, зокрема, в радіолокації і при далекому радіозв'язку. В умовах повної апріорної інформації про вхідні дії (корисному сигналі і перешкодах) можна побудувати систему фільтрації, що забезпечує екстремальне значення відповідному критерію оптимальності, що характеризує роботу системи. Проте в умовах недостатності апріорної інформації вчення — єдина дорога побудови оптимальної системи фільтрації. В процесі вчення змінюються параметри системи фільтрації, а інколи навіть її структура, в результаті чого критерій оптимальності асимптотика наближається до свого екстремального значення.
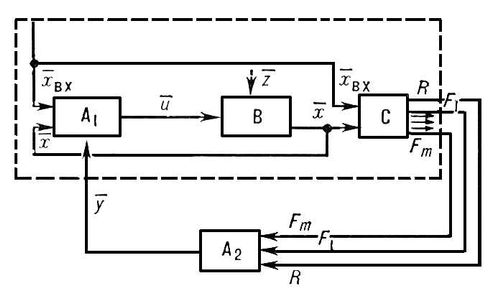
О. а. с. управління можуть застосовуватися на літальних апаратах, в технологічних агрегатах і ін. Структурна схема типової системи автоматичного управління, в якій на основі вчення реалізується оптимальний (у певному значенні) процес управління, представлена на рис . Покладемо, мета управління полягає в тому, щоб забезпечити найменше значення деякої величини (функціонала) R , залежною в загальному випадку від функцій задаючого вх (t) і керівника (t), дій і від керованої величини (t), тобто
, (1)
Ця мета має бути досягнута за наявності певних обмежень, що полягають в тому, що деякі величини (функціонали) F i де i = 1, 2..., m , не повинні перевершувати встановлених для них значень, тобто
, (2)
де (t) — обурення, що впливає на об'єкт управління. Покладемо, крім того, що повна апріорна інформація відносно (t) і вх (t) відсутній, т.к. в осоружному випадку завдання побудови оптимальної системи управління може бути, в принципі, вирішена без вчення. У даній системі основна частина пристрою A, що управляє, 1 має алгоритм управління, здатний змінюватися в широкому діапазоні, а ін. частина — А 2 може впливати на A 1 , перебудовувавши його алгоритм. Грунтуючись на меті управління, пристрій А 2 з допомогою алгоритмів вчення і у міру накопичення досвіду, який визначається сукупністю реакцій пристрою A 1 на можливі зміни режимів роботи об'єкту В , виробляє дії * (t) , які все більш і більш наближаються до необхідних значень. Потрібними є такі значення (t) , які відповідно до отриманих в обчислювальному пристрої З значеннями критерію оптимальності R (при обмеженнях F* i ) перебудовують алгоритм роботи A 1 т. о., що виконуються умови (1) і (2). Розглянута О. а. с. управління є асимптотика оптимальною.
Літ.: Фельдбаум А. А., Процеси вчення людей і автоматів, в збірці: Кібернетика, мислення, життя, M., 1964; Нільсон Н. Дж., Машини, що виучуються, пер.(переведення) з англ.(англійський), M., 1967; Ципкин Я. З., Адаптація і вчення в автоматичних системах, M., 1968; його ж, Основи теорії систем, що виучуються, M., 1970; Горелік А. Л., Ськріпкин Ст А., Деякі питання побудови систем розпізнавання об'єктів і явищ, M., 1974.