Структурна схема системи автоматичного регулювання (САР), графічне зображення такої системи у вигляді сукупності частин, на які її можна розділити по певних ознаках, і зв'язків між частинами з вказівкою напряму передачі дій. С. с. систем управління взагалі будують за конструктивним, функціональним або алгоритмічним принципом. У автоматичному регулюванні використовуються переважно алгоритмічні С. с. динамічні властивості САР, що повністю відображують. По диференціальних рівняннях, що описують якусь САР, можна побудувати її алгоритмічну С. с., і навпаки, знаючи таку С. с.. можна скласти диференціальні рівняння, САР, що описують.
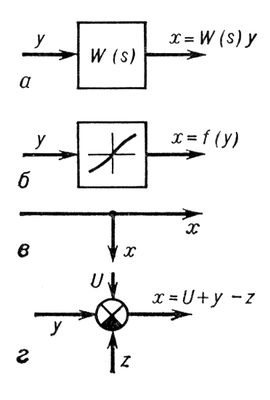
На С. с. змальовують ланки САР (яким ставлять у відповідність передавальні функції ланок або операторів виконуваних ними нелінійних перетворень), зв'язки і вузли (точки розгалуження зв'язків). Серед найважливіших ланок з елементарними алгоритмами розрізняють: динамічні (що змінюють вхідну дію в часі) — інтегруючі, диференціюючі, тимчасової затримки; що формують (змінюючий масштаб і форму вхідної дії і т.п.) — пропорційні, модуляційні, імпульсні; арифметичні — що підсумовують, розмножувальні і т.п.; логічні (здійснюючі логічні операції над вхідними величинами). Лінійні динамічні і масштабні ланки, а також перетворювачі функціональні змальовують на С. с. прямокутниками, суматор — кружком, розділеним на сектори (сектори, до яких підводяться від'ємники, часто зачернюють), вузол — жирною крапкою на пересіченні відповідних зв'язків (мал. 1). Передавальною функцією (ПФ) окремої ланки або САР в цілому називається відношення зображень (див. Лапласа перетворення ) їх вихідних і вхідних величин (за нульових початкових умов). ПФ повністю описує динамічні властивості систем них ланок. Зазвичай її позначають W ( s ) або W ( p ) або просто W ( s або р — аргумент перетворення Лапласа).
Будь-яку лінійну частину САР із зосередженими постійними параметрами можна розчленувати на елементарні, далі неділимі ланки чотирьох типів — інтегруючі, диференціюючі, масштабні і такі, що підсумовують. Реальні САР (в яких міра чисельника ПФ не вища за міру знаменника) можна представити, як правило, ланками всього трьох типів (без диференціюючих). Розчленовування на елементарні ланки зручно при моделюванні САР на аналогових обчислювальних машинах . При ін. методах дослідження лінійну частину зазвичай розчленовують на складніші типові ланки: першого порядку — неідеальні диференціюючі, інтегро-діфференцирующис, аперіодичні; другого порядку — неідеальні інтегруючі, такі, що коливають, запізнюються і ін. Порядок лінійної ланки С. с. визначається порядком що описує його динаміку диференціального рівняння.
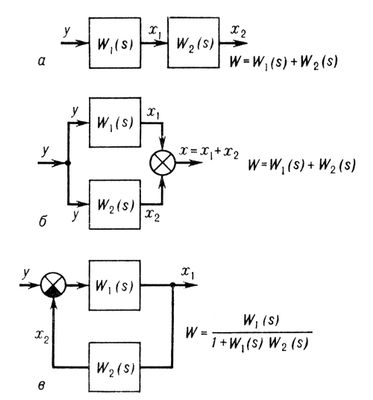
Поськольку ПФ систем адекватно описують їх динамічні властивості, одну С. с. можна замінити інший, еквівалентною їй, при єдиному необхідному і достатній умові — рівності їх ПФ. При цьому перетворення звичайних лінійних С. с. виробляється відповідно до правил перетворення з'єднань простого типа — послідовних, паралельних і із зворотним зв'язком (ріс.2). С. с. в цілому і ланки будь-якого порядку вище другого можуть бути замінені декількома С. с. або ланками порядку не вище другого, що значно спрощує аналіз і синтез САР.
При структурному дослідженні САР поряд з С. с. користуються орієнтованими графами (див. Графів теорія ) , вершинам яких ставлять у відповідність параметри системи, а ребрам — ПФ або оператори функціональних перетворень.
Літ.: Петров Би. Н., Про побудову і перетворення структурних схем, «Ізв. АН(Академія наук) СРСР. Відділення технічних наук», 1945 №12; Солодових А. Ст, Лінійні системи автоматичного управління із змінними параметрами, М., 1962: Шаталов А. С., Структурні методи в теорії управління і електроавтоматиці, М. — Л., 1962; Воронів А. А., Основи теорії автоматичного управління, ч. 1—3, М., 1965—70; Технічна кібернетика. Теорія автоматичного регулювання, під ред. Ст Ст Солодовникова, кн. 1, М., 1967.