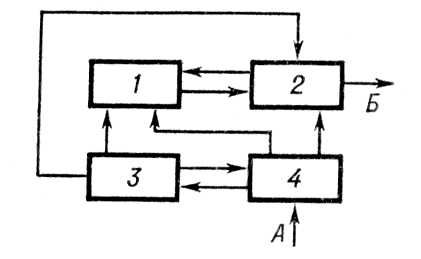
Блок-схема інерціальної навігаційної системи: 1 — блок інерціальних вимірників і будівників напрямів в просторі (акселерометри і гіроскопічні пристрої), за допомогою якого реалізується задана орієнтація вимірювальних осей і з якого видається вимірювальна інформація в обчислювач; 2 — обчислювальний блок, в якому здійснюються інтеграція основного рівняння, обчислення необхідних параметрів руху, формування сигналів (у деяких інерціальних навігаційних системах) управління орієнтацією інерціальних вимірників і сигналів компенсації систематичних погрішностей (прискорення тяжіння, поворотного прискорення, від несферичності Землі і ін.); 3 — блок часу, з якого в блоки 1, 2, 4 поступають сигнали світового часу; 4 — блок введення початкової інформації в блоки 1 і 2 для орієнтації інерціальних вимірників і інтеграції основного рівняння; А — вступ початкової інформації; Б — видача кінцевій інформації про параметри руху. Стрілками показані напрями вступу інформації.