Телемеханічна система (структурна схема) (зображення)
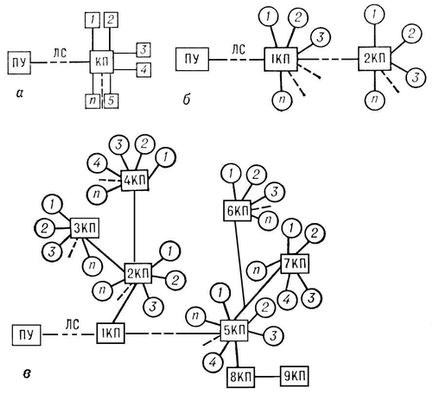
Структурна схема телемеханічної системи: а — для зосереджених об'єктів; би, в — для розосереджених об'єктів (цепочечная і деревовидна); ПУ — пункт управління (диспетчерський пункт); КП — контрольований пункт; ЛС — лінія зв'язку; 1, 2, 3..., n — об'єкти управління (контролю).