Телемеханическая система (структурная схема) (изображение)
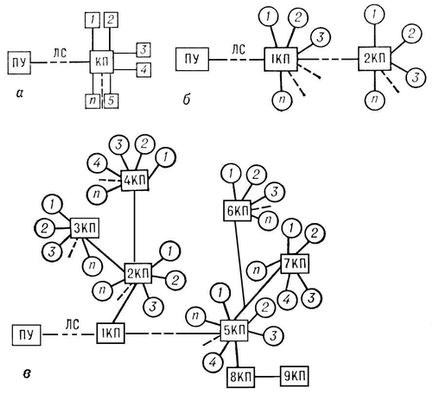
Структурная схема телемеханической системы: а — для сосредоточенных объектов; б, в — для рассредоточенных объектов (цепочечная и древовидная); ПУ — пункт управления (диспетчерский пункт); КП — контролируемый пункт; ЛС — линия связи; 1, 2, 3,..., n — объекты управления (контроля).