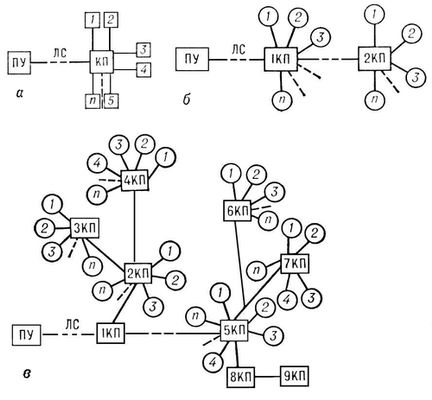
Телемеханічна система, система телемеханіки, комплекс технічних засобів для передачі на відстань по каналах радіозв'язку або дротяним лініям зв'язку команд від оператора або обчислювальної машини, що управляє, до об'єктів управління, а також контрольної інформації у зворотному напрямі (див. Телемеханіка ) . Т. с. включає пункт управління (ПУ), де знаходиться оператор (диспетчер), один або декілька контрольованих пунктів (КП), де розташовуються об'єкти управління (контролю), і лінії зв'язки (канали передачі даних), що сполучають ПУ з КП. У складних Т. с. може бути декілька ПУ — рівноправних або підпорядкованих Один одному відповідно до ієрархічного принципу.
Розрізняють Т. с. для зосереджених об'єктів (що знаходяться в межах одного КП; мал. а ) і Т с. для розосереджених об'єктів (розташованих групами на декількох КП або розсіяних поодинці на великій території; мал. би , в ) . Приклад Т. с. першого вигляду — система управління окремим будівельним краном, літаком, насосною станцією і т. д. Характерні приклади Т. с. другого вигляду — системи управління газо- і нафтопроводами, енергосистемами, же. -д. вузлами, шахтами і заводами, де управління здійснюється з одного диспетчерського пункту .
В Т. с. інформація про стан і параметри об'єктів управління, що поступає на ПУ, зазвичай сприймається людиною-оператором, який на підставі отриманих даних приймає рішення і подає команди управління. На ПУ є диспетчерський щит, оснащений відповідними пристроями вистави контрольній інформації, і диспетчерський пульт з органами управління телемеханічною апаратурою (з кнопками, ключами, тумблерами і т. п.) і пристроями формування сигналів управління об'єктами. При великих об'ємах інформації її обробка і перетворення до вигляду, найбільш зручного для ухвалення рішень оператором, виробляються автоматичними пристроями або ЕОМ(електронна обчислювальна машина).
В Т. с. можуть передаватися все або лише деякі види контрольної інформації, що управляє. При передачі інформації лише про значення параметрів об'єктів Т. с. називається системою телевимірювання (ТІ); у системі телесигналізації (ТС) передається переважно інформація про те, в якому з можливих станів (зазвичай з двох) знаходиться контрольований об'єкт; у системі телекерування (ТУ) передаються лише команди управління. У комбінованих Т. с. здійснюється передача інформації декількох видів, наприклад вимірника і сигналізує (ТІ—ТС), управляє і сигналізує (ТУ— ТС). У комплексних Т. с. можлива передача контрольної інформації всіх видів, що управляє (ТУ — ТС — ТІ).
Основні характеристики Т. с.: набір виконуваних функцій і видів інформації, тип розташування об'єктів, дальність дії, число обслуговуваних об'єктів, швидкодія, достовірність передачі інформації, надійність, структура і тип каналів зв'язку.
Апаратура Т. с. в простому випадку складається з передавального і приймального напівкомплектів, за допомогою яких здійснюється передача телемеханічної інформації. Т. с. часто включають в себе автоматичні пристрої (наприклад, для циклічного опиту об'єктів, передачі команд за заданою програмою, порівняння поточних значень контрольованих параметрів із заданими, діагности пошкоджень), що полегшують роботу оператора або надійність, що підвищують, і ефективність передачі інформації по каналу зв'язку. Т. с. — складний технічний комплекс, до складу якого входять всілякі пристрої і прилади, що налічують десятки і сотні тисяч різних елементів. У початковий період розвитку телемеханіки (почало 20 ст) апаратура Т. с. була переважно релейно-контактною; у 50-х рр. 20 ст релейно-контактна апаратура була витиснена безконтактними елементами (магнітними, напівпровідниковими і ін.); у 70-х рр. відбувається перехід на мікроелектронні елементи і агрегатний метод побудови Т. с. Так, розроблена в СРСР агрегатна система засобів телемеханіки (АССТ) є набором уніфікованих функціональних блоків виконаних на інтегральних схемах, і ряд телемеханічних пристроїв, побудованих з цих блоків. АССТ входить в Державну систему промислових приладів і засобів автоматизації — ГСП .