Постійного струму електродвигун , постійного струму машина, що працює в режимі двигуна. П. т. е. дорожче за двигуни змінного струму і вимагають великих витрат на обслуговування, проте вони дозволяють плавно і економічно регулювати частоту обертання в широких межах, унаслідок чого набули поширення на рейковому і безрейковому електрифікованому транспорті, в підіймальних кранах, на прокатних станах, в пристроях автоматики і т.п.
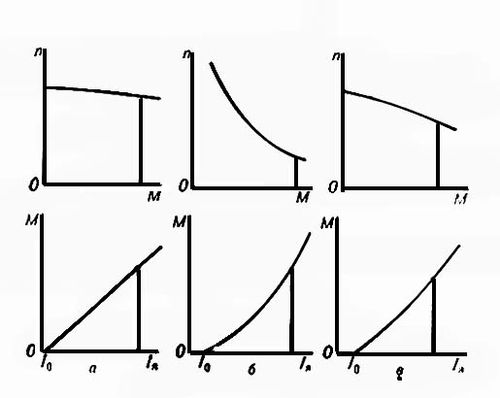
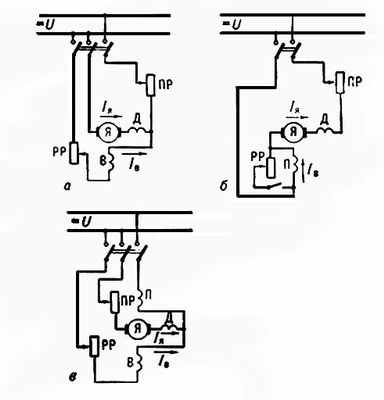
Основні характеристики П. т. е. — залежність частоти обертання n від моменту (моменту на валу) М-коду, що обертає, звана механічною характеристикою, і залежність моменту, що обертає, від струму якоря (ротора) I я . Вигляд характеристик ( мал. 2 ) визначається системою збудження двигуна ( мал. 1 ); збудження може бути незалежним, паралельним або змішаним. При незалежному і паралельному збудженні частота обертання міняється трохи, залежність n = f ( M ) має слабо виражений падаючий характер (т.з. «жорстка» характеристика). Для того, щоб частота обертання при зміні моменту обертання мінялася в широких межах, застосовують послідовне збудження; при цьому залежність n = f ( M ) має явно виражений падаючий характер («м'яка» характеристика). Інколи в П. т. е. з незалежним збудженням частота обертання з різних причин може збільшуватися із зростанням моменту на валу, що приводить до нестійкої роботи двигуна. Для підтримки стійкого режиму роботи, що забезпечується падаючим характером кривої n = f ( M ) . часто застосовують змішане збудження (застаріла назва — компаундне збудження ), при якому основний магнітний потік створюється паралельною обмоткою збудження, а послідовна обмотка є такою, що стабілізує. При змішаному збудженні механічна характеристика має проміжний характер.
При підключенні П. т. е. до джерела живлення струм в обмотці якоря (пусковий струм) в 15—20 разів перевищує номінальне значення (у початковий момент едс(електрорушійна сила) якорі рівна 0 і струм обмежується лише опором ланцюгу якоря). Для того, щоб зменшити пусковий струм, в ланцюг якорі включають т.з. пусковий опір, яке у міру наростання частоти обертання поступово зменшують; після закінчення пуску його замикають накоротко.
П. т. е. з паралельним збудженням мають межі регулювання частоти обертання приблизно 1: 3. У них зручніше і найдешевше регулювати частоту обертання реостатом в ланцюзі збудження. Регулювання може вироблятися як у бік збільшення, так і у бік зменшення частоти обертання, причому при всіх частотах обертання ккд(коефіцієнт корисної дії) зберігається досить високим.
В П. т. е. з послідовним збудженням частота обертання регулюється у бік зменшення реостатом в ланцюзі якоря, у бік збільшення — включенням паралельно обмотці збудження шунтуючого опору. Втрати в реостаті, введеному в ланцюг якоря, істотно знижують ккд(коефіцієнт корисної дії). При шунтуванні обмоток збудження ккд(коефіцієнт корисної дії) змінюється трохи.
В СРСР П. т. е. випускаються серіями, наприклад серія ДК потужністю 40—110 квт на напругу 250, 350, 750 в з регулюванням частоти обертання від 0 до 4000 об/мін — для міського електрифікованого транспорту, серія Д потужністю 2,5—185 квт на напругу 220—440 в з діапазоном регулювання частоти обертання 1: 3 — для приводу потужних прокатних станів, підіймальних кранів всіх типів і т.п. У системах автоматичного регулювання і в електроприладах побутового призначення набули поширення електроприводи з мікродвигунами постійного струму. Основна їх гідність — значно більші, ніж в мікродвигунів змінного струму, діапазон і точність регулювання.