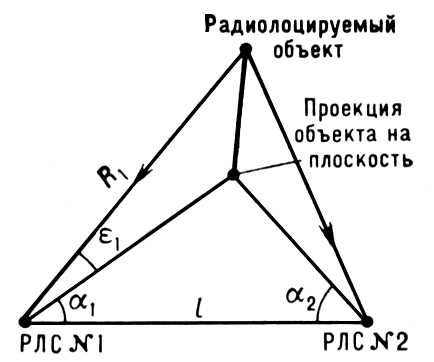
Мал. 2. Схема визначення координат об'єкту: L — відстань між РЛС № 1 і РЛС № 2; a 1 і a 2 — кути, що визначають азимути об'єкту, отримані відповідно на РЛС № 1 і РЛС № 2; e 1 — кут місця об'єкту, отриманий на РЛС № 1; R 1 — дальність похилої об'єкту відносно РЛС № 1.