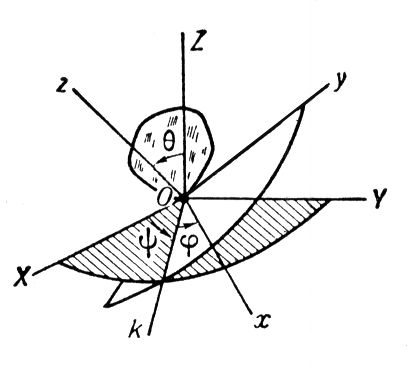
Эйлеровы углы, углы j, q, y определяющие положение прямоугольной декартовой системы координат OXYZ относительно другой прямоугольной декартовой системы координат Oxyz с той же ориентацией (см. рис.). Пусть OK — ось (линия узлов), совпадающая с линией пересечения координатной плоскости Оху первой системы с координатной плоскостью ОХУ второй системы и направленная так, что оси Oz, OZ, OK образуют тройку той же ориентации. Тогда Э. у. будут: j — угол собственного вращения — угол между осями Ox и OK, отсчитываемый в плоскости Оху от оси Ox в направлении кратчайшего поворота от Ox к Оу,q— угол нутации, не превосходящий p — угол между осями Oz и OZ; y — угол прецессии — угол между осями OK и OX, отсчитываемый в плоскости ОХУ от оси OK в направлении кратчайшего поворота от OX к ОУ. При q = 0 или p Э. у. не определяются. Введены Л. Эйлером в 1748. Широко используются в динамике твёрдого тела (например, в теории гироскопа) и небесной механике.