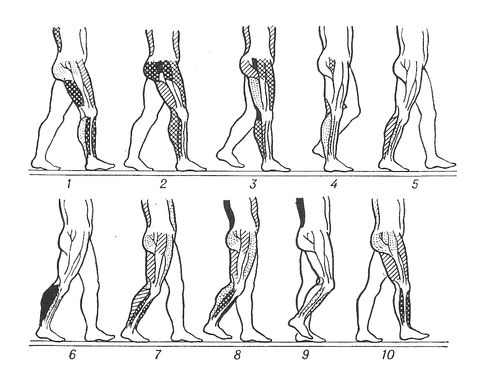
Ходьба, один із способів пересування (локомоциі ) тварин і людини; здійснюється в результаті складної координованої діяльності скелетних м'язів і кінцівок. Розрізняють двоногу Х., властиву деякою твариною, наприклад окремим видам ящірок, птицям, кенгуру, людиноподібним мавпам і людині, і многоногую, що розглядається як сукупність елементів, властивих двуногой Х. Прі двуногой Х. тіло послідовно спирається то на одну, то на ін. ногу (опорную), друга у цей момент виноситься вперед (переносна нога). У циклічній послідовності Х. виділяють моменти, коли з опорою стикаються лише одна нога («одинопорний період») і обидві ноги, коли передня кінцівка вже торкнулася опори, а задня ще не відірвалася («двуопорний період»). Період перенесення ноги називається «Переносним періодом». Повний цикл Х. — період подвійного кроку — складається для кожної ноги з опорного і переносного інтервалів (см. мал.(малюнок) ). Із збільшенням темпу Х. «двуопорниє періоди» коротшають і зовсім зникають при переході в біг. У опорний період активне м'язове зусилля кінцівок створює динамічні поштовхи, що повідомляють центру тяжіння тіла прискорення, необхідне для поступальної ходи. Моменти відштовхування і настання на опору характеризуються тиском, що перевищує масу тіла, В проміжку між ними тиск падає до мінімуму. Із збільшенням темпу Х. тиск на опору зростає.
В процесі Х. людина не лише здійснює стереотипні рухи, адаптовані до умов середовища, але і підтримує рівновагу. Центр тяжіння тіла під час Х. здійснює рухи у всій трьох плоскості. По вертикалі амплітуда його переміщень досягає 4—5 см; найбільш низьке положення центру тяжіння в «двуопорний період». У людини в процесі Х. найбільшу участь беруть м'язи ніг (литковий, довгий малогомілковий, чотириглавий, двоголовий м'яз стегна, напівпоперечний і напівсухожильний), тазу (середня сіднична, клубово-поперекова). Рухи плечового поясу врівноважують протилежно направлені обертання тазу і нижньої частини тулуба.
Послідовність і координація скорочення різних м'язів забезпечуються розташованим в спинному мозку генератором того, що крокує, який управляється вищими відділами центральної нервової системи, головним чином субталамічеськой областю проміжного мозку. Пріуроченность фаз відштовхування і перенесення ноги визначається сигналами, що поступають переважно від мишечних, а також дістантних рецепторів (зрітельних, слухових), що коригують впливи яких опосередкують через вищі відділи центральної нервової системи (мозочок, стріопаллідарний комплекс і кору великих півкуль). Проте нормальні крокуючі рухи можуть виявлятися і без аферентних сигналів — межконечностноє взаємодія достатня для побудови координованої Х. Інтенсивность збудження, що передається на спінальний рівень, визначає перехід Х. у біг, галоп і т.д. Передбачається, що цей механізм однаковий для тварин і людини. Вивчення Х. представляє інтерес стосовно завдань фізичної культури (спортивна Х.), військової гігієни, ортопедії і протезування, а також конструювання крокуючих роботів. Для вивчення Х. застосовують циклографію, іхнографію (вивчення відбитків стопи при Х.), електроміографію .
Літ.: Бернштейн Н. А., Про побудову рухів, М., 1947; Гранує Р., Основи регуляції рухів, пер.(переведення) з англ.(англійський), М., 1973; Фізіологія рухів Л.; 1976 (Керівництво по фізіології); Grillner S., Locomotion in vertebrates: central mechanisms and reflex interaction, «Physiological Reviews», 1975, v. 55 № 2, р. 247—304.