Динамічне гальмування електроприводу, режим роботи електроприводу, при якому в результаті взаємодії постійного магнітного потоку в електродвигуні із струмом замкнутого електропровідного контура створюється гальмівне зусилля. У електроприводі з електродвигуном постійного струму Д. т. здійснюється замиканням обмотки якоря накоротко або через додатковий активний опір при включеній обмотці збудження. У електроприводі з асинхронним електродвигуном Д. т. досягається пропусканням по обмотці статора постійного струму, при цьому обмотка ротора утворює замкнутий контур. Д. т. синхронного електродвигуна виконується при включеній обмотці збудження і замиканні накоротко або через додатковий активний опір обмотки статора.
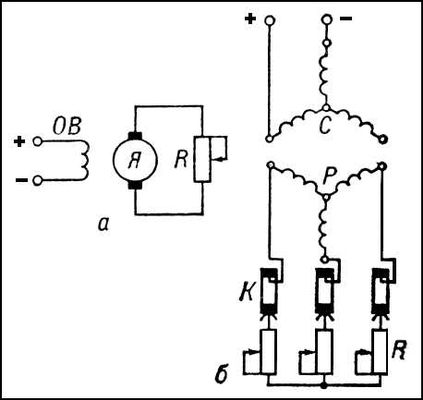
Приклади включення електродвигунів постійного і змінного струму для виконання Д. т. приведені на мал. 1 .
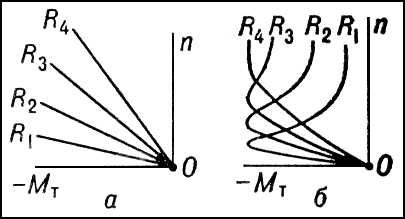
Гальмівне зусилля залежить від частоти обертання електродвигуна. Ця залежність називається гальмівною механічною характеристикою електроприводу. При різних опорах R 1 < R 2 < R 3 < R 4 механічні характеристики різні як в електродвигунів постійного струму ( мал. 2 , а), так і в асинхронних електродвигунів з фазним ротором ( мал. 2 , би). Втрати енергії в електродвигуні при Д. т. мають порядок значення кінетичної енергії, запасеної в масах електроприводу, що обертаються (при повній зупинці). Д. т. застосовують для швидкої зупинки електроприводу робочих машин, при необхідності рівномірного підйому і спуску вантажів, в шахтних підйомниках і тому подібне
Літ.: Голован А. Т., Основи електроприводу, М. — Л., 1959; Вешеневський С. Н., Характеристики двигунів в електроприводі, 5 видавництво, М., 1967; Мейстель А. М., Електроприводи з напівпровідниковим управлінням. Динамічне гальмування приводів з асинхронними двигунами, М. — Л., 1967.