Гидролокатор (от гидро... и лат.(латинский) loco — помещаю), гидролокационная станция, гидроакустическая станция (прибор) для определения положения подводных объектов при помощи звуковых сигналов. Кроме расстояния до погруженного в воду объекта, некоторые Г. определяют также его глубину погружения по наклонной дальности и углу направления на объект в вертикальной плоскости. О методах определения Г. местоположения объекта и о применении Г. см.(смотри) в ст. Гидролокация.
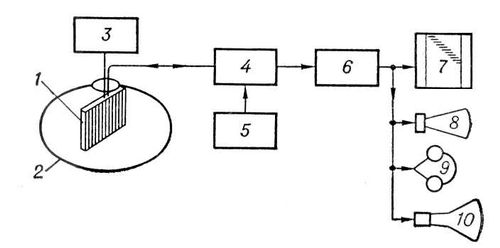
Работа Г. (рис.) происходит следующим образом. Импульс электрического напряжения, выработанный генератором, через переключатель «приём — передача» подаётся к электроакустическим преобразователям (вибраторам), излучающим в воду акустический импульс длительностью 10—100 мсек в определенном телесном угле или во всех направлениях. По окончании излучения вибраторы подключаются к гетеродинному усилителю для приёма и усиления отражённых от объектов импульсных акустических сигналов. Затем сигналы поступают на индикаторные приборы: рекордер, электродинамический громкоговоритель, телефоны, электроннолучевую трубку (ЭЛТ). На рекордере измеряется и регистрируется электрохимическим способом на ленте расстояние (дистанция) до объекта; с помощью телефонов и электродинамического громкоговорителя принятые сигналы прослушиваются на звуковой частоте и классифицируются, по максимуму звучания определяется пеленг; на ЭЛТ высвечивается сигнал от объекта и измеряется дистанция до него и направление (пеленг). Длительность паузы между соседними посылками импульсов составляет несколько сек.
По способу поиска объекта различают Г. шагового поиска, секторного поиска и кругового обзора. При шаговом поиске и пеленговании по максимуму сигнала акустическую систему поворачивают в горизонтальной плоскости на угол 2,5—15°, делают выдержку (паузу), равную времени прохождения импульсом пути от Г. до объекта, находящегося на максимально возможной дальности, и от объекта до Г., а затем производят следующий поворот. При пеленговании фазовым методом акустическую систему выполняют в виде двух раздельных систем, переключаемых бесконтактным коммутационного устройством из режима излучения в режим приёма и обратно. Суммарные и разностные сигналы, снятые с двухканального компенсатора, после усиления и сдвига по фазе подводятся к ЭЛТ и рекордеру, где отсчитывается дистанция. Этот способ характеризуется сравнительно высокой точностью пеленгования, большим (несколько мин) временем обследования водного пространства и возможностью слежения лишь за одним объектом. При секторном поиске акустическая энергия излучается одновременно в определенном секторе, а приём и пеленгование отражённых сигналов производятся при быстром сканировании характеристики направленности в пределах этого сектора. При наиболее распространённом круговом обзоре осуществляют ненаправленное (круговое) излучение и направленный (в пределах узкой вращающейся диаграммы направленности) приём, что обеспечивает обнаружение и пеленгование всех окружающих Г. объектов. Акустическая система (антенна) такого Г. выполняется в виде цилиндра или сферы, состоящих из большого количества отдельных вибраторов, и размещается в подъёмно-опускном устройстве или в стационарном обтекателе. К преимуществам этого способа относятся быстрое обследование всего горизонта, возможность обнаруживать и следить за несколькими объектами.
Большинство Г. работает в звуковом и ультразвуковом диапазонах частот (4—40 кгц). Это обусловлено необходимостью получения острой направленности антенны (при относительно небольших её размерах) и достижения заданной разрешающей способности. Г. различного назначения обладают дальностью действия от сотен метров до десятков километров и обеспечивают точность пеленгования около 1°. Для уменьшения неблагоприятного влияния гидрологических факторов (см. Гидроакустика) на дальность действия применяют Г. с акустической системой, помещенной в контейнер, буксируемый кораблём на глубине несколько десятков м (Г. с переменной глубиной погружения).