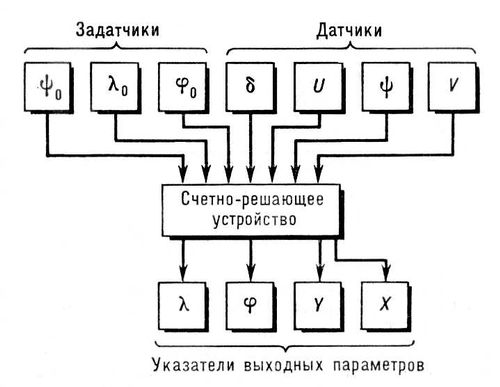
Автоштурман, автономний аеронавігаційний пристрій, автоматично і що безперервно виробляє прокладку дороги (обчислення поточних координат) літального апарату. По виконуваних функціях А. розділяють на автоматичні покажчики поточних координат, необхідні для орієнтування, і програмні навігаційні автомати, що направляють політ по заданій траєкторії або до заданої мети. А. ( мал. ) складається з датчиків дійсного повітря швидкості і курсу, датчиків швидкості і напряму вітру, задатчиков кута карти і координат мети, рахунково-вирішального пристрої, покажчиків параметрів, що задаються і вихідних.
Дія А. зводиться до безперервної інтеграції за часом рахунково-вирішальним пристроєм складових путньої швидкості літального апарату, рівних геометричній сумі дійсної повітряної швидкості і швидкості вітру, внаслідок чого забезпечується вимір пройденного відстані на мету (X) і бічного відхилення від заданого маршруту (Y) в умовній системі координат OXY, поверненій відносно географічної системи координат на кут карти y 0 . Перед вильотом в А. вводяться координати місця вильоту — географічна широта j 0 і довгота l 0 . У польоті А. безперервно вимірює вектор дійсної повітряної швидкості V і дійсний курс y, а швидкість вітру U і його напрям (кут d) визначаються періодично і вводяться в А. або уручну, або автоматично.
Т. до. принцип дії А. заснований на непрямому методі виміру, то у нього, окрім інструментальних помилок, існують також і методичні помилки. Наявність останніх обумовлює доцільність комплектування А. з іншими бортовими системами навігації (інерціальною, радіотехнічною і ін.). У літературі А. отримав також назви — навігаційний автомат повітря числення дороги і навігаційний координатор. Перший А. у СРСР запропонував В. Ю. Поляк в 1930.
Літ.: Селезнев Ст П., Навігаційні пристрої, М., 1961.